Schlüsselwörter
Robotik - TORS - Kopf-Hals-Tumor - Haptik - Kosten - Studien
1. Einleitung
Die Roboter-assistierte Chirurgie (RAC) hält zunehmend Einzug in die Kopf-Hals-Chirurgie,
ist aber noch vielfach umstritten. Die Vorteile der RAC liegen darin, dass sie unsere
operativen Fähigkeiten nicht nur durch Verbesserung unserer traditionellen chirurgischen
Methoden verändert, sondern auch die Möglichkeit neuer operativer Zugänge bietet [63]. An fokussierten Zentren wird die RAC regelmäßig für gutartige und maligne Erkrankungen
im Oropharynx eingesetzt. Besonders im asiatischen Raum werden auch immer öfter Roboter-assistierte
Eingriffe an der Schilddrüse durchgeführt. Dies spiegelt sich sowohl in der Anzahl
der verkauften Roboter-Systeme als auch in den Fallzahlen für RAC wider, welche weltweit
zunehmen. Die RAC bietet eine optimierte Visualisierung und Erreichbarkeit des Operationsgebiets,
wodurch das Gewebetrauma reduziert werden kann. Zusätzlich erscheinen verbesserte
ästhetische Resultate möglich, da in einigen Fällen auf eine konventionelle Operation
mit offener Schnittführung verzichtet werden kann. Trotz allem hat sich die RAC in
Europa auch im Kopf-Hals-Bereich noch nicht vollständig durchgesetzt. Die Gründe hierfür
liegen in der aufwändigen Handhabung der Roboter-Systeme und dem finanziellen Mehraufwand
bei häufig fehlender Gegenfinanzierung. Vor allem aber zeigt sich bislang klinisch
kein sicherer Vorteil der RAC gegenüber konventionellen Operationsverfahren wie der
transoralen Lasermikrolaryngoskopie (TLM).
Ein Roboter ist ein programmierbares Mehrzweckwerkzeug, welches für das Bewegen von
Material, Werkstücken und Spezialgeräten eingesetzt wird. Der Bewegungsablauf ist
frei programmierbar, und der Roboter ist daher für verschiedenste Aufgaben einsetzbar
[2]. Üblicherweise wird ein Roboter verwendet, um sich wiederholende, ermüdende Tätigkeiten
mit hoher Präzision und Reproduzierbarkeit zu übernehmen. Im Allgemeinen wird einem
Roboter daher ein hohes Maß an autonomer Tätigkeit zugeschrieben, was auf die in der
Medizin eingesetzten Geräte allerdings meistens nicht zutrifft. Die Einschränkungen
hierfür sind in ungelösten technischen Herausforderungen und vorliegenden Sicherheitsbedenken
zu finden.
Die heute eingesetzten Roboter-Systeme sind Computer-gestützte Operationswerkzeuge,
welche im besten Fall die Operationsabläufe optimieren und die Genauigkeit des Eingriffs
erhöhen können. Die folgende Übersichtsarbeit beschreibt die neuesten Entwicklungen
der RAC und ist nach anatomischen Unterregionen des Kopf-Hals-Bereiches unterteilt.
Im Weiteren werden die haptischen Aspekte, die Risiken und die finanzielle Komponente
der RAC diskutiert, sowie aktuell laufende klinische Studien vorgestellt.
2. Roboter-Systeme
Der Großteil der weltweit durchgeführten Roboter-assistierten Operationen im Kopf-Hals-Bereich
wird aktuell mit dem DaVinci-System der Firma Intuitive Surgical (Sunnyvale, USA)
durchgeführt ([Abb. 1]). Die Firma ist in den 80er-Jahren aus dem Forschungsinstitut ,SRI International‘
hervorgegangen. Hinlänglich bekannt ist der militärische Hintergrund der Entwicklung,
bei dem mithilfe des Roboters rasche operative Eingriffe im Schlachtfeld ohne direkte
Anwesenheit des Operateurs durchgeführt werden sollten. Im Jahr 2003 erfolgte die
Vereinigung mit ,Computer Motion‘, dem Hersteller des früheren ZEUS-Roboter-Systems,
welches später vom Markt genommen wurde.
 Abb. 1 Die neuesten Versionen des DaVinci-Systems (Intuitive Surgical, USA). a Die Xi-Generation mit Instrumentenarmen, welche über dem Patienten positioniert werden.
b Prototyp des DaVinci-SinglePort Systems mit triangulierbaren Instrumenten. Copyright:
2017 Intuitive Surgical, Inc.
Abb. 1 Die neuesten Versionen des DaVinci-Systems (Intuitive Surgical, USA). a Die Xi-Generation mit Instrumentenarmen, welche über dem Patienten positioniert werden.
b Prototyp des DaVinci-SinglePort Systems mit triangulierbaren Instrumenten. Copyright:
2017 Intuitive Surgical, Inc.
Das aktuelle DaVinci-System besteht aus 3 Instrumentenarmen, die einen starren Schaft
und einen beweglichen Endeffektor besitzen. Die Instrumente verlieren nach 15–20 Verwendungszyklen
ihre Zulassung und werden elektronisch verriegelt. Die Bildgebung erfolgt über einen
vierten Kameraarm, der eine 3-dimensionale Visualisierung ermöglicht. Im Gegensatz
zu den meisten anderen Systemen erfolgt der Informationsaustausch zwischen dem Roboter-System
und dem Operateur beim DaVinci-System rein elektronisch. Somit ist der Abstand zwischen
Patient und Operateur variabel und kann im Extremfall mehrere tausend Kilometer betragen
[111]. Der DaVinci-Roboter wird hauptsächlich im gynäkologischen Fachbereich eingesetzt,
aber unter anderem auch in der Urologie, Allgemeinchirurgie und Kopf-Hals-Chirurgie.
Das DaVinci-System kam 1999 erstmals in Europa auf den Markt und erhielt 2001 zunächst
die FDA-Zulassung für die Abdominalchirurgie. Die Arbeitsgruppe um Weinstein et al.
in Philadelphia/USA leistete frühe Pionierarbeit zur Anwendung des DaVinci-Systems
im Kopf-Hals-Bereich [61], woraufhin 2009 die Zulassung der ,food and drug administration‘ (FDA) für die transorale
Roboter-assistierte Chirurgie (TORS) erfolgte.
Das initiale DaVinci-Modell wurde 2006 durch eine 3-dimensionale Visualisierung verfeinert
(DaVinci-S) [16]. Die 3D-Visualisierung führt zu einer signifikanten Verbesserung des Operationsresultats
und wird in der Roboter-assistierten Chirurgie in naher Zukunft wohl Standard sein
[184]. Während die nächste Si-Generation des DaVinci-Systems von 2009 noch auf einem Wagen
neben dem Operationstisch geparkt wird, hat die Xi-Generation von 2014 eine Konstruktion,
bei der die Instrumentenarme vollständig über dem Patienten lokalisiert sind ([Abb. 1a]). Die neue, leicht reduzierte X-Generation hat 2017 die CE-Zulassung für den europäischen
Markt erhalten. Die X-Generation hat zwar die dünneren Arme des Xi-Systems, ist aber
auf einem Beistellwagen wie beim Si-System fixiert. So kann das X-System mit einem
reduzierten Verkaufspreis von ca. 1 Millionen USD auf den Markt gebracht werden, um
neue Zielgruppen anzusprechen. Noch keine Zulassung hat das DaVinci-SinglePort (SP)-System
erhalten, welches sich aktuell im Rahmen von klinischen Studien in der Erprobung befindet
([Abb. 1b]
).
Neben dem DaVinci-System hat sich nun auch das FLEX®-System (Medrobotics, Raynham, USA) für die transorale Roboter-assistierte Chirurgie
etablieren können. Die zentrale Komponente des FLEX®-System ist ein Computer-gesteuertes flexibles Endoskop, welches sich beim Einführen
der nicht-linearen Anatomie des Pharynx angleichen kann ([Abb. 2]). Somit können prinzipiell auch Patienten behandelt werden, bei denen keine Retroflexion
der Halswirbelsäule möglich ist. Nach Arretieren des Endoskops werden anschließend
flexible Instrumente durch zusätzliche Arbeitskanäle entlang des Endoskops eingeführt,
mit denen der operative Eingriff im Halsbereich durchgeführt werden kann [158]. Die Visualisierung erfolgt über eine HD-Kamera an der Spitze des Endoskops. Die
Zulassungsstudie erfolgte an 4 HNO-Zentren in Europa mit insgesamt 80 Patienten und
führte 2016 zur Zulassung durch die FDA für den amerikanischen Markt [94]. Somit steht mit dem FLEX®-System neben dem DaVinci ein weiteres praxistaugliches chirurgisches Assistenzsystem
für die Kopf-Hals-Chirurgie zur Verfügung.
 Abb. 2 Das FLEX® System (Medrobotics, USA). a Der flexible Aufbau ermöglicht die Anpassung an die menschliche Anatomie. b In der Spitze des Endoskops sind die Kamera und die Lichtquellen integriert. Die
flexiblen Instrumente werden über separate Kanäle eingeführt. c Das FLEX® System hat die Zulassung für Eingriffe am Pharynx und Larynx erhalten.
Abb. 2 Das FLEX® System (Medrobotics, USA). a Der flexible Aufbau ermöglicht die Anpassung an die menschliche Anatomie. b In der Spitze des Endoskops sind die Kamera und die Lichtquellen integriert. Die
flexiblen Instrumente werden über separate Kanäle eingeführt. c Das FLEX® System hat die Zulassung für Eingriffe am Pharynx und Larynx erhalten.
3. Oropharynx
Das Kerngebiet der transoralen Roboter-assistierten Chirurgie liegt in den Pathologien
des Oropharynx inklusive der Tonsillen, des Zungengrundes, sowie der Pharynx-Seitenwände
([Abb. 3]). Dies ist v. a. in der guten Erreichbarkeit aber auch an der relativ hohen Patientenzahl,
welche Erkrankungen in dieser Region aufweisen, begründet. Nachdem das DaVinci-System
im Vorfeld für Eingriffe in der Gynäkologie und Urologie zugelassen worden war, konnten
Weinstein et al. 2007 erstmals bei 3 Patienten eine Roboter-assistierte supraglottische
Laryngektomie dokumentieren [193]. Im selben Jahr erfolgte die Publikation einer prospektiven, einarmigen Phase I
Studie bei Patienten mit Tonsillen-Karzinom (T1-2, n=27). Die Resektionsränder waren
bei 25/27 Patienten ausreichend, die Komplikationen beinhalteten Schleimhautblutung,
Delirium, ungeplante Tracheostomie bei OSAS, leichter Trismus und Näseln [194]. Einige Jahre später folgte die Publikation einer amerikanischen Multicenterstudie
mit 192 Patienten, hauptsächlich mit Oropharynx-Karzinomen [192].
Aufgrund der unzureichenden Einstellbarkeit konnte der Eingriff allerdings in 15/192
Patienten (~7,8%) nicht vollständig durchgeführt werden.
Basierend auf diesen Machbarkeitsstudien werden heute kleinere Oropharynx-Karzinome
(T1–T2) an einigen Zentren routinemäßig mit TORS behandelt [70]. Außerdem konnte seitdem eine Reihe von weiteren klinischen Zentren ihre Erfahrungen
mit TORS im Oropharynx beschreiben. Hierzu zählen unter anderem deutsche Arbeitsgruppen
(n=50, n=17) [109]
[113], das französische TORS-Konsortium (n=169) [8], eine südkoreanische Arbeitsgruppe (n=27) [103] und eine belgische Multicenterstudie (n=86) [121]. Das Gesamtüberleben in diesen Studien ist regelmäßig vergleichbar mit dem nach
primärer Radiochemotherapie [197]. Da es sich bei den TORS-Fällen jeweils um nicht-randomisierte Fallbeschreibungen
handelt, muss allerdings von einem deutlichen Bias bei der Patientenselektion ausgegangen
werden.
Mit Zunahme der TORS-spezifischen Kenntnisse wurde auch der Parapharyngeal-Raum in
die Liste der möglichen Indikation für TORS aufgenommen. So konnten O’Malley et al.
eine Fallserie von 10 Patienten mit benignen Tumoren des Parapharyngeal-Raums erfolgreich
mit dem DaVinci-System operieren [129]. Ebenso war dies Arshad et al. in 3 Patienten mit benignen oder malignen Tumoren
gelungen [7]. Allerdings setzt der TORS-Eingriff in dieser Region eine detaillierte Kenntnis
der parapharyngealen Anatomie voraus. Besonders der Verlauf der A. carotis interna
und des Nervus glossopharyngeus ist bei transoraler Sichtweise von Bedeutung und wird
von Wang et al. im Detail beschrieben [185]. Weiterhin ist die Inzidenz der Pathologien im parapharyngealen Raum gering und
nur ein Teil davon kann tatsächlich chirurgisch therapiert werden.
Eine besondere Position nehmen Patienten mit obstruktivem Schlafapnoe-Syndrom (OSAS)
ein. Da es sich hierbei um eine nicht-maligne Erkrankung mit hoher Inzidenz handelt,
wird die Frage, ob sich der finanzielle Aufwand eines Roboter-assistierten Eingriffs
rechtfertigen lässt, immer wieder leidenschaftlich diskutiert. Eine Tonsillektomie
und Zungengrund-Reduktion kann sicherlich auch ohne Roboter-System adäquat durchgeführt
werden. Die Vorteile von TORS werden hingegen mit einem verminderten Operationstrauma
und schnellerer postoperativer Heilungsphase angegeben. Ohne Zweifel ist, wie von
Vicini et al. beschrieben, die Uvulopalatopharyngoplastik (UPPP) bei korrekter Indikation
eine gute Möglichkeit, um die Beschwerden der OSAS-Patienten zu reduzieren (n=234)
[183]. Diese Erkenntnis wird durch die Beobachtungen von Hoff et al. unterstützt (n=285)
[62]. Friedman et al. konnten beim Behandlungserfolg einen Vorteil von TORS gegenüber
alternativen Operationsmethoden wie Radiofrequenz-Ablation oder submuköse Exzision
des Zungengrundes errechnen. Allerdings war die Morbidität in Bezug auf Dysphagie
und Heilungsdauer in der TORS-Gruppe signifikant erhöht (n=27) [49]. Golbin et al. konnten aufzeigen, dass die präoperative Schlafendoskopie als Teil
der Indikationsentscheidung wesentlich zum Operationserfolg beiträgt [58]. In ihrem Patientenkollektiv (n=104) zeigte sich aber auch, dass TORS-Eingriffe
im Vergleich zu konventionellen Operationen einen erhöhten Kostenaufwand und längere
Krankenhausliegezeiten verursachen, ohne dass das operative Ergebnis verbessert werden
konnte. Abschließend konnten verschiedene Meta-Analysen den Behandlungserfolg von
TORS bei OSAS auch bei übergewichtigen Patienten bestätigen [55]
[116]. Die Frage, ob TORS gegenüber alternativen Operationsmethoden einen Vorteil erbringt,
welcher den hohen finanziellen Mehraufwand rechtfertigt, bleibt aber weiterhin unbeantwortet.
Auffallend wenige Arbeitsgruppen haben sich in der Literatur mit der Roboter-assistierten
Resektion von Zungengrund-Tumoren beschäftigt. Die Erstbeschreibung erfolgte durch
O’Malley et al. 2006 bei 3 Patienten [131]. Eine weitere Fallserie mit 13 Patienten wurde 2013 durch die italienische Arbeitsgruppe
um Mercante et al. publiziert [119]. Beide Studien bescheinigten eine gute Durchführbarkeit mit günstigen funktionellen
Ergebnissen.
Mit zunehmender Erfahrung der Operateure erscheinen nun auch Roboter-assistierte Eingriffe
am Hypopharynx sicher durchführbar. Park et al. publizierten schon 2013 eine retrospektive
Studie zum Hypopharynx-Karzinom, in der TORS (n=30) mit offener Chirurgie verglichen
wurde [140]. Unter Berücksichtigung der Selektionsbias zeigte die TORS-Gruppe bessere Werte
für die Dekanülierungsrate, Schluckvermögen und Krankenhausliegezeit. Die 5-Jahres-Überlebensrate
war für beide Gruppen vergleichbar [141]. Kleinere Fallserien bestätigen die Durchführbarkeit von TORS im Hypopharynx (n=5)
und speziell im Sinus piriformis (n=10) [108]
[187]. Die oben beschriebenen Eingriffe wurden jeweils mit den elektrischen Resektionsinstrumenten
des DaVinci-Systems durchgeführt. Kucur et al. zeigten beispielhaft an einem Patienten,
dass auch im Hypopharynx eine Roboter-assistierte Laserresektion möglich ist [88]. Die flexible Laserfaser wurde hierbei mit dem Nadelhalter geführt. Trotz dieser
ermutigenden Beschreibungen, sollte klar bleiben, dass die Patienten für TORS eine
optimale Einstellbarkeit des Hypopharynx haben müssen und somit selbstverständlich
auch einer transoralen Lasermikrochirurgie zugänglich sind. Eine weitere Patientengruppe,
welche potentiell eine Anwendungserweiterung für TORS darstellt, sind die Divertikel
im oberen Hypopharynx. Bei Anwendung eines flexiblen Roboter-Systems könnten sich
hier Vorteile bei schlecht einstellbaren Patienten ergeben, was bisher in Kadaverstudien
demonstriert worden ist [51].
Ein wichtiger Aspekt bei der Auswahl der Therapieoptionen sind die Langzeitverläufe
der Patientengruppen. Verschiedene Arbeitsgruppen konnten den TORS-Patienten günstige
Überlebensraten und gute funktionelle Ergebnisse bescheinigen [38]
[122]. Allerdings sind die chirurgischen und nicht-chirurgischen Behandlungsprotokolle
mit denen TORS retrospektiv verglichen wurde, nicht näher beschrieben worden. Ebenso
war die Lebensqualität der TORS-Patienten im Langzeitverlauf zufriedenstellend, während
eine eventuelle adjuvante Radio-(chemo)-Therapie die Lebensqualität tendenziell reduzierte
[45]
[66].
Eine kleine Gruppe an TORS-Operateuren hat sich in der Vergangenheit mit der Roboter-assistierten
Chirurgie von freien Gewebstransplantaten beschäftigt [40]. Die Erstbeschreibung erfolgte 2009 durch Mukhija et al., welche in 2 Patienten
ein Radialis-Transplantat Roboter-assistiert zur Pharynx-Rekonstruktion einnähen konnten
[125]. Weitere Arbeitsgruppen folgten unter Verwendung von Radialis-, Oberschenkel- oder
Jejunum-Transplantaten [18]
[31]
[56]
[142]. In einer weiteren Fallserie wurde ebenfalls ein Radialis-Transplantat zur Defektdeckung
nach TORS verwendet, welches aber konventionell ohne Roboter-Assistenz eingenäht wurde
[13]. Hervorzuheben ist die Publikation von Song et al., in der die Roboter-assistierte
Naht einer Gefäßanastomose unter Verwendung spezieller Mikroinstrumente beschrieben
wird [167].
 Abb. 3 Die Hauptindikation für TORS sind Tumoren des Oropharynx (T1-2) wie in diesem PET-CT
dargestellt. Copyright: Schuler PJ.
Abb. 3 Die Hauptindikation für TORS sind Tumoren des Oropharynx (T1-2) wie in diesem PET-CT
dargestellt. Copyright: Schuler PJ.
4. Nasopharynx
Der Nasopharynx bietet sich aufgrund seiner anatomischen Lage potentiell sehr gut
für die Roboter-assistierte Chirurgie an. Die traditionelle, offene Chirurgie ist
aufwendig und oft nur durch große Zugangswege, wie die Unterkieferspaltung mit entsprechender
Morbidität erreichbar [188]. Auf der anderen Seite ist der Nasopharynx mit geeigneten Instrumenten sowohl transnasal
als auch transoral durch existierende Körperöffnungen erreichbar, ohne dass weitere
Hautinzisionen notwendig werden. Beide Zugänge werden in alleiniger Anwendung oder
in deren Kombination im Folgenden diskutiert. Hierbei ergeben sich immer wieder Überschneidungen
mit den Zugängen zur Schädelbasis, so dass zusätzlich auf das folgende Kapitel „Nasennebenhöhlen
und Schädelbasis“ verwiesen wird. Eine vollständige Roboter-assistierte Nasopharyngektomie
wurde erstmalig 2008 durch Ozer et al. im Kadavermodell beschrieben [137]. Die Arbeitsgruppe wählte hierfür den alleinigen transoralen Zugangsweg mit dem
DaVinci-System. Die Visualisierung wurde durch eine leichte Kopf-Extension in der
Trendelenburg-Position nochmals verbessert, wodurch der gesamte Nasopharynx eingesehen
wurde und auch die A. carotis interna bds. unter Sicht präpariert werden konnte. Allerdings
war für den Eingriff eine paramediane Gaumenspaltung notwendig.
Eine weiter lateral durchgeführte Gaumenspaltung mit Bildung eines gestielten Weichteiltransplantates
wurde durch Tsang et al. beschrieben [179]. Durch die weitere Eröffnung des Gaumens ergibt sich eine bessere Übersicht des
Operationsgebiets besonders bei lateral gelegenen Pathologien. Die Wunde kann nach
Abschluss der Operation vollständig mit dem Roboter vernäht werden. Die Gaumenspaltung
an sich ist nicht wünschenswert, weshalb weitere Systeme für die Roboter-assistierte
Chirurgie am Nasopharynx getestet wurden. So konnten Richmon et al. 2014 erstmalig
die transorale Nasopharyngektomie mit dem FLEX®-System in einer Kadaverstudie beschreiben [147]. Aufgrund der flexiblen Bauweise des computer-gesteuerten Endoskops kann bei gleichbleibender
Visualisierung auf die Gaumenspaltung verzichtet werden. Ebenso zeigte das selbe System
im Vergleich mit der starren transnasalen Endoskopie Vorteile im Nasopharynx, da 2
Instrumente zeitgleich zum Einsatz kommen [159]. Vielversprechend ist die Beschreibung von Holsinger et al., welche die Möglichkeit
hatten, das neue DaVinci-SinglePort System für die Nasopharynx-Chirurgie zu testen
[180]. Auch hier konnte im Kadavermodell die vollständige Nasopharyngektomie mit Darstellung
der A. carotis interna und des Trigeminus-Nervens ohne Gaumenspaltung durchgeführt
werden. Ob der Einsatz eines dritten Instrumentenarms, wie von den Autoren beschrieben,
in der Praxis von Vorteil ist, bleibt abzuwarten.
Der rein transnasale, endoskopische Zugang zum Nasopharynx ist besonders für Rezidive
von Nasopharynx-Karzinomen im Rahmen der Salvage-Chirurgie mehrfach als „extended
endonasal approach“ (EEA) beschrieben worden [29]. Wie von Castelnuovo et al. an 36 Patienten demonstriert, ist dieser Eingriff durch
erfahrene Chirurgen durchaus auch bei fortgeschrittenen Karzinomen durchführbar. Aufgrund
der eingeschränkten Visualisierung und Erreichbarkeit von anatomischen Strukturen,
ist dieser Zugang bisher aber nur für ausgewählte Patienten praktikabel. Die Möglichkeit,
eine navigierte Biopsie des Nasopharynx mithilfe eines neuartigen Kontinuums-Roboters
durchzuführen, ist 2017 von Wu et al. in einem Kadavermodell beschrieben worden [196]. Das System besteht aus 2 konzentrischen, starren Röhren, welche unabhängig voneinander
gesteuert werden können. Dieser nicht-lineare Zugang ist vergleichsweise atraumatisch
und könnte somit potentiell auch unter Lokalanästhesie zum Einsatz kommen.
Analog zur Roboter-assistierten Schädelbasis-Chirurgie sind auch für Eingriffe am
Nasopharynx transorale Zugänge in Kombination mit transantralen oder transzervikalen
Zugängen beschrieben worden [33]
[36]. Beide Zugänge ermöglichen eine gute Visualisierung und Manipulation des gesamten
Nasopharynx. Aufgrund der deutlich erhöhten Zugangsmorbidität und den fehlenden Bohrinstrumenten
beim erweiterten transantralen Zugang sind diese Prozeduren allerdings bisher ausschließlich
in Kadaverstudien beschrieben worden.
In der Chirurgie des Nasopharynx ist der kombinierte transnasale/transorale Zugang
in der Entwicklung am weitesten fortgeschritten. So führten Dallan et al. 2012 eine
vollständige transorale Nasopharyngektomie mit dem DaVinci-System durch [36]. Auf eine Gaumenspaltung konnte verzichtet werden, wenn der Kamera-Arm transnasal
eingeführt wurde. Hierfür zeigte sich eine posteriore Septumresektion als hilfreich,
um die Visualisierung des gesamten Operationsgebiets zu optimieren. Sinnvoll erscheint
auch die Kombination des transoralen Roboter-assistierten Zugangs (TORS) mit der transnasalen
endoskopischen Operation. Diese Operationsweise nutzt die Vorteile beider Zugänge,
welches sich im Nasopharynx optimal ergänzen können. So konnten Sreenath et al. an
drei klinischen Fällen demonstrieren, dass dieses Verfahren prinzipiell durchführbar
ist [168]. Die behandelten Patienten litten unter einer retropharyngealen Metastase eines
Schilddrüsen-Karzinoms, einem Schleimhautmelanom des Nasopharynx und einer nasopharyngealen
Synechie nach nasalem Drogenabusus.
Die Arbeitsgruppe von Wei et al. in Hong Kong besitzt die weitaus größte klinische
Erfahrung mit Roboter-assistierten Operationen im Nasopharynx. Bereits 2010 konnte
ein Patient mit Rezidiv eines Nasopharynx-Karzinoms transoral mit dem DaVinci-System
erfolgreich operiert werden [189]. Trotz Anwendung der Instrumente mit EndoWrist®-Design, welche eine erweiterte Rotation im Endbereich erlauben, war wie oben beschrieben
für den Eingriff eine Gaumenspaltung notwendig. 2 Jahre später erfolgte die Behandlung
eines Patienten, welcher ebenfalls ein Karzinom-Rezidiv am Dach des Nasopharynx präsentierte
[198]. Der Eingriff erfolgte ähnlich wie bei Sreenath et al. mit einem kombinierten transoralen
Roboter-assistierten und einem transnasalen endoskopischen Eingriff ohne Roboter-Assistenz,
so dass der Tumor en bloc mit ausreichendem Sicherheitsabstand entfernt werden konnte.
Eine Fallserie von 12 Patienten mit Rezidiv eines Nasopharynx-Karzinoms wurde schließlich
2014 von Tsang et al. publiziert [181]. Das Tumorstadium umfasste T1–T4, und alle Patienten wurden über einen transoralen
Zugang und Gaumenspaltung mit dem DaVinci-System operiert. Bei 11/12 Patienten wurde
ein ausreichender Sicherheitsabstand oder eine close-margin Situation erreicht. Die
beschriebenen Komplikationen umfassten eine Osteonekrose des Clivus, eine persistierende
Gaumen-Fistel und einen hypoxischen Hirnschaden. In der onkologischen Nachsorge zeigten
2/12 Patienten ein Lokalrezidiv und ein Patient distale Metastasen. Nach Angaben der
Autoren lag die Überlebensrate ohne adjuvante Therapie nach 2 Jahren bei 83%. So stellt
TORS besonders bei Lokalrezidiven eines Nasopharynx-Karzinoms durchaus eine therapeutische
Option mit akzeptablen Ansprechraten dar. Die Arbeitsgruppe diskutiert darüber hinaus
den Stellenwert der chirurgischen Therapie bei Tumor-Rezidiven im Nasopharynx im Vergleich
zu alternativen Behandlungsoptionen [190]. Für den europäischen Raum wurde aufgrund der geringeren Inzidenz des Nasopharynx-Karzinoms
allerdings in einer Meta-Analyse noch eine zurückhaltende Empfehlung für Roboter-assistierte
Eingriffe am Nasopharynx gegeben [120].
5. Larynx
Die konsequente Weiterentwicklung von TORS mündet in den Roboter-assistierten Eingriffen
am Larynx. Multiple Publikationen beschreiben Fallserien von Patienten mit supraglottischen
Pathologien, was durch die gute Erreichbarkeit der Epiglottis zu erklären ist. Dies
steht allerdings in keiner Relation zu der niedrigen Inzidenz von Epiglottis-Karzinomen.
Zusätzlich sind diese oft aufgrund der Ausdehnung oder des Patientenalters einer operativen
Therapie nicht weiter zugänglich, was sich auch in der niedrigen Fallzahl in den publizierten
Fallserien widerspiegelt. Ebenso wie die Transorale Laser-Mikrochirurgie (TLM) benötigen
die starren Instrumente des DaVinci-Systems auch einen weitgehend geradlinigen Zugangsweg
(,straight line of sight‘), und die Größe des Gerätes führt besonders bei der Larynxchirurgie
häufiger zu mechanischen Interferenzen zwischen den Instrumenten. Um die Vorteile
von TORS gegenüber der TLM aufzuzeigen, wären auch hier randomisierte klinische Studien
notwendig, welche zum aktuellen Zeitpunkt noch nicht vorliegen.
Die wichtigsten Fallserien beinhalten die Erstbeschreibung im Tiermodell und von 3
klinischen Fällen 2007 durch Weinstein et al. [191]
[193]. Das größte Patientenkollektiv liefert die Subgruppenanalyse des französischen TORS-Konsortiums
(n=84) [145]. In dieser Studie sind allerdings die hohen Quoten an unzureichenden Resektionsrändern
(52%) und an Nachblutungen (18%) überraschend, welche sich nicht mit den Daten anderer
Publikationen decken. Solares et al. konnten den Einsatz einer flexiblen CO2-Laserfaser an der Supraglottis beschreiben [164]. Die koreanische Arbeitsgruppe um Kim et al. publizierte deutlich bessere funktionelle
Ergebnisse für TORS als für die offene Kehlkopf-Teilresektion bei supraglottischen
Karzinomen in einer nicht-randomisierten, prospektiven Studie (n=34), welche unter
Rücksicht auf die Selektionsbias interpretiert werden müssen [139]. Weitere Fallserien wurden mit ähnlichen Erkenntnissen publiziert [118]
[135].
Neben dem DaVinci-System wird auch das FLEX®-System für Eingriffe an der Supraglottis eingesetzt. So wurden im Rahmen der europäischen
Zulassungsstudie insgesamt 16 Patienten mit supraglottischen Pathologien an der Epiglottis,
den Taschenfalten und den Stellknorpeln mit flexibler TORS behandelt [94]. Unabhängig vom System ergibt sich aber bisher kein effektiver Vorteil von TORS
gegenüber der in Europa standardmäßig eingesetzten TLM für die supraglottische Larynx-Chirurgie.
Hier ist eine speziell auf die Larynx-Chirurgie abgestimmte Weiterentwicklung der
RAC notwendig.
Eine vollständige ,transorale Roboter-assistierte Laryngektomie‘ (TORS-LE) könnte
aufgrund seiner minimalen Hautinzision das Risiko einer Speichelfistel reduzieren,
was besonders bei Salvage-Operationen von Vorteil sein kann [54]. Möglicherweise kann so die empfohlene zusätzliche Defektdeckung mittels gestieltem
Pectoralis-Lappen bei Salvage-Laryngektomie überflüssig werden [53]. Die Neck dissection kann entweder 2-zeitig durchgeführt oder durch klinische Kontrollen
ersetzt werden [47]. Die TORS-LE wird von kaudal über einen kleinen Tracheostomie-Hautschnitt nach kranial
präpariert und anschließend von transoral mittels Roboter-System vervollständigt.
Die notwendige Pharynx-Naht kann, wie von Lawson et al. beschrieben, ebenfalls von
transoral durchgeführt werden [95]. Anschließend folgten amerikanische, australische und chinesische Fallserien mit
kleinerer Fallzahl, welche die Durchführbarkeit im klinischen Bereich bestätigten
[31]
[85]
[163]. Für die TORS-LE können außer dem DaVinci-System auch weitere Instrumente verwendet
werden. So demonstrierten Fernandez et al. den Einsatz eines Ultraschall-Skalpells
für den transoralen Teil der TORS-LE [48]. Unsere Arbeitsgruppe konnte in einem Kadavermodell die Verwendung des FLEX®-Systems untersuchen, wobei der transzervikal nicht-robotisch durchgeführte Anteil
der Operation deutlich ausgeweitet werden kann [160].
Obwohl das DaVinci®-System nicht für den Einsatz an den Stimmlippen entwickelt wurde, häufen sich die
Erfahrungsberichte in diesem Bereich. So konnten Blanco et al. 2011 erstmals die Resektion
eines T1-Larynx-Karzinoms mit einer flexiblen CO2-Faser publizieren [15]. Im folgenden Jahr berichteten Kayhan et al. über eine Fallserie mit 10 Patienten,
bei denen eine Roboter-assistierte Chordektomie durchgeführt wurde [74]. Eine Tracheostomie war nur in einem Fall indiziert, und die Autoren sahen einen
Vorteil von TORS gegenüber TLM in Bezug auf Visualisierung und Zugang zum Operationsgebiet.
Ähnliche Ergebnisse wurden durch Lallemant et al. beschrieben [93]. Ein Lokalrezidiv wurde bei 2/13 Patienten in der vorderen Kommissur festgestellt,
was zeigt, dass auch bei TORS dieser Bereich aufgrund seiner schlechten Exposition
als besonders kritisch einzustufen ist. Schließlich konnten Wang et al. eine Fallserie
mit glottischen Larynx-Karzinomen beschreiben, welche keine Tracheostomie benötigten
und bei einer durchschnittlichen Nachbeobachtungszeit von 40 Monaten kein Lokalrezidiv
entwickelt haben (n=8) [186].
Nach entsprechenden Kadaverstudien konnten klinische Eingriffe auf Glottis-Ebene auch
mit dem FLEX®-System im Rahmen der Zulassungsstudie durchgeführt werden [50]
[94]. Da das FLEX®-System aber nicht primär für Glottis-Eingriffe konstruiert worden ist, war die Visualisierung
in 3 von 5 Fällen frustran, und der Eingriff musste zu einer konventionellen TLM konvertiert
werden. Abhilfe könnten neue, kleinere Instrumente schaffen, welche speziell für die
Larynx-Chirurgie entwickelt werden und für 2018 angekündigt sind.
6. Nasennebenhöhlen und Schädelbasis
6. Nasennebenhöhlen und Schädelbasis
Der Roboter-assistierte Zugang zur Schädelbasis würde die operativen Möglichkeiten
an den teils vulnerablen anatomischen Strukturen deutlich erweitern. Aufgrund der
technischen Limitationen ist der Einsatz von Roboter-Systemen in diesem Bereich allerdings
bisher auf Kadavermodelle und klinische Einzelfallbeschreibungen beschränkt [171]
[177]. Das DaVinci-System erscheint aufgrund seiner Größe nicht die optimale Struktur
für den Zugang zur Schädelbasis zu besitzen [155]. Daher existieren mehrere alternative Systeme, welche die speziellen Anforderungen
für dieses Operationsgebiet adressieren.
Burgner et al. haben einen Kontinuums-Roboter entwickelt, der transnasal ohne weitere
Hilfsschnitte eingeführt wird [22]. Aufgrund seiner Bauweise mit 3 konzentrischen Metallrohren kann über einen Joystick
jeder beliebige Punkt in einem 3-dimensionalen Raum nicht-linear angesteuert werden
([Abb. 4]). Jedes Metallrohr wird über einen eigenen Motor unabhängig in seiner Extension
und Rotation gesteuert. Die Entfernung eines Hypophysen-Tumors erschien so in einem
humanen Schädelmodell durchführbar. Morimoto et al. schlagen eine personalisierte
Lösung vor, bei der basierend auf der Fragestellung und entsprechender Bildgebung
Patienten-spezifische konzentrische Rohre hergestellt werden [124]. Dieser Ansatz wurde allerdings zunächst nur für urologische Patienten ausgeführt.
 Abb. 4 Der Kontinuums-Roboter des Lehrstuhls für Kontinuums-Robotik an der Leibniz Universität
Hannover besteht aus konzentrischen Röhren, welche unabhängig voneinander bewegt werden
können.
Abb. 4 Der Kontinuums-Roboter des Lehrstuhls für Kontinuums-Robotik an der Leibniz Universität
Hannover besteht aus konzentrischen Röhren, welche unabhängig voneinander bewegt werden
können.
Die vollautomatische Keilbeinhöhlen-Operation wurde 2005 von der Erlanger Arbeitsgruppe
in einem Kadavermodell realisiert [20]. Hierfür wurde ein Bohrsystem auf einen Roboter-Arm mit sechs Freiheitsgraden montiert
und mit einem optischen Navigationssystem gekoppelt. Die durchschnittliche Genauigkeit
des gesamten Systems lag bei 1,5 mm. Über eine Weiterentwicklung des Systems ist allerdings
bisher nicht berichtet worden.
Im Folgenden werden 3 Endoskop-Halter vorgestellt, welche dem Operateur den gleichzeitigen
Einsatz von 2 Instrumenten ermöglichen. Der SOLOASSIST Endoskop-Halter (AKTORmed,
Regensburg) ist ursprünglich für die Abdominalchirurgie entwickelt worden und wird
nun in Kadaverstudien für die Anforderungen der lateralen Nasennebenhöhlen- und Schädelbasischirurgie
adaptiert ([Abb. 5a]) [86]. Der Endoskop-Halter kann direkt über einen kleinen Joystick gesteuert werden, welcher
an die starren Standard-Instrumente montiert wird. In den publizierten Kadaverstudien
konnten die wichtigsten Landmarken an der lateralen und frontalen Schädelbasis sicher
identifiziert werden.
 Abb. 5 a Die neueste Version des SOLOASSIST automatisierten Endoskophalters für minimalinvasive
Nasennebenhöhlen-Chirurgie (AKTORmed, Regensburg). b Der robotische Endoskophalter von Medineering (München) ist für die Nasennebenhöhlen-Chirurgie
entwickelt worden und steht kurz vor der klinischen Zulassung.
Abb. 5 a Die neueste Version des SOLOASSIST automatisierten Endoskophalters für minimalinvasive
Nasennebenhöhlen-Chirurgie (AKTORmed, Regensburg). b Der robotische Endoskophalter von Medineering (München) ist für die Nasennebenhöhlen-Chirurgie
entwickelt worden und steht kurz vor der klinischen Zulassung.
Eine Sprachkontrollfunktion mit 23 Einzelbefehlen war in dem alternativen AESOP Endoskop-Halter
(Computer Motion, Goleta, CA) integriert, so dass auch hier 2 Instrumente gleichzeitig
eingesetzt werden konnten. Zusätzlich konnten anatomische Landmarken gespeichert und
später durch ein kurzes Kommando erneut visualisiert werden. Nathan et al. demonstrierten
mithilfe des AESOP Systems den Zugang zur Sella turcia in einem humanen Kadavermodell
[126]. Für das selbe System wurde kurze Zeit später ein zusätzliches Modul entwickelt,
mit dem das Endoskop über die Pupillenbewegung des Operateurs gesteuert werden konnte
[4]. Der AESOP Endoskop-Halter war als eigenständiger Baustein in den ZEUS-Roboter integriert,
welcher die FDA-Zulassung 2001 erhalten hatte. Das AESOP- und ZEUS-System werden nicht
mehr hergestellt und vertrieben. Vergleichsweise jung ist der Endoskop-Halter der
Firma Medineering (München), welcher speziell für die Nasennebenhöhlen- und Schädelbasischirurgie
entwickelt wird ([Abb. 5b]). Das System besteht aus einem mehrgelenkigen Haltearm ohne eigenen Antrieb sowie
aus einer kleineren Robotereinheit, welche am Ende des Haltearms befestigt wird. Die
Robotereinheit wird über einen Fuß-Joystick bewegt und verfügt über sieben Freiheitsgrade.
Erste Kadavertests an den Nasennebenhöhlen und der Schädelbasis sind durch unsere
Arbeitsgruppe erfolgreich durchgeführt worden, und die Zulassung für den europäischen
Raum wird in Kürze erwartet [51].
Das oben beschriebene FLEX®-System wurde hauptsächlich für den Einsatz im Oropharynx entwickelt. In einem humanen
Kadavermodell konnte unsere Arbeitsgruppe das System für die Visualisierung der Nasennebenhöhlen,
der vorderen Schädelbasis und des Hirnstamms adaptieren [161]. Allerdings ist die Miniaturisierung des Endoskops für einen transnasalen Zugang
bisher noch nicht ausreichend fortgeschritten, und die Resektion der knöchernen Strukturen
mit den vorhandenen Instrumenten bleibt eine bisher unüberwindbare Herausforderung.
Für den Einsatz des DaVinci-Systems an der Schädelbasis sind verschiedene Zugänge
beschrieben worden, welche je nach Operationsgebiet spezifische Vorteile haben können
[144]. Der kombinierte transnasale/transorale Zugang ist zunächst relativ atraumatisch,
da keine äußeren Zugangsschnitte angelegt werden müssen ([Abb. 6a]). In dem humanen Kadavermodell von Carrau et al. konnte über diesen Zugang die Fossa
infratemporalis, die Clivusregion und der kraniozervikale Übergang dargestellt werden.
Ebenso konnte die Arbeitsgruppe in 2 klinischen Fällen einen malignen Tumor aus dem
Nasopharynx resezieren. Hierbei wurde der kranielle Anteil des Tumors mittels herkömmlichen
starren Instrumenten über einen transnasalen Zugang und der kaudale Tumoranteil mittels
TORS reseziert [28]. Ebenso wurde der transorale Zugang in einem klinischen Fall getestet, in dem die
Resektion des Dens axis bei Kompressionssyndrom der Arteria basilaris erfolgreich
durchgeführt wurde [101] ([Abb. 6b]). Allerdings scheint hier der Einsatzbereich durch die geringe Auswahl der verfügbaren
Knocheninstrumente, wie z. B. ein Bohrer, limitiert zu sein. Der kombinierte transnasale/transorale
Zugang beschreibt auch einen Aufbau, bei dem die Kamera des DaVinci-Systems transnasal
eingeführt wird und für die Arbeitsinstrumente der transorale Zugang gewählt wird.
Erstmals beschrieben wurde dieser Zugang in einem humanen Kadavermodell, welcher die
hintere Schädelgrube adressierte [136].
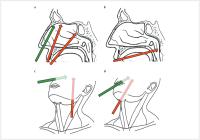 Abb. 6 Die Roboter-assistierten Zugänge zur Schädelbasis umfassen a transnasal in Kombination mit transoral oder transantral; b rein transoral; c transnasal in Kombination mit transzervikal; und d transoral in Kombination mit suprahyoidal. Copyright: Schuler PJ.
Abb. 6 Die Roboter-assistierten Zugänge zur Schädelbasis umfassen a transnasal in Kombination mit transoral oder transantral; b rein transoral; c transnasal in Kombination mit transzervikal; und d transoral in Kombination mit suprahyoidal. Copyright: Schuler PJ.
Den kombinierten transnasalen/transantralen Zugangsweg zur Schädelbasis konnten Kupferman
et al. in einem humanen Kadavermodell demonstrieren. Auch hier erfolgte die Visualisierung
der Schädelbasis über die transnasal platzierte Kamera des DaVinci-Systems. Die Arbeitsinstrumente
werden über den transantralen Zugang nach midfacial degloving eingeführt. Über diesen
Zugang konnten die mediale Orbita, die Siebbeinzellen, die Riechrinne, die Keilbeinhöhle,
die Fossa pterygopalatina und der Clivus dargestellt werden [59]. Der leicht modifizierte transantrale/transmaxilläre Zugang ist laut derselben Arbeitsgruppe
auch ausreichend zur Defektdeckung an der Schädelbasis im Kadavermodell [89].
Beim transnasalen/transzervikalen Zugang werden die Instrumente über einen Hautschnitt
am beidseitigen Kieferwinkel eingeführt ([Abb. 6c]). Der Zugang wird mit stumpfer Präparation erweitert und während des Eingriffs mit
einem Trokar offengehalten. Das Kamera-System wird transnasal eingeführt [37]. Dieser Zugang hat zwar eine höhere Invasivität als der transorale Zugang, kann
aber bei Patienten mit ungünstigem Zahnstatus oder maxillärer Retrognathie vorteilhaft
sein, um den Oberkiefer zu schützen. Zusätzlich stehen die Arbeitsinstrumente so in
einem verbesserten Winkel zueinander, was die Manipulation der Schädelbasis erleichtert.
Ebenso kann dieser transzervikale Zugang der Instrumente mit einer transoralen Kameraführung
kombiniert werden, um die Darstellung der Keilbeinhöhle, des Clivus, der Sella und
der Hypophyse in einem humanen Kadavermodell zu erreichen [130].
Abschließend konnte die Arbeitsgruppe um McCool et al. den Zugang zur Fossa infratemporalis
über einen kombinierten transoralen/suprahyoidalen Zugang im humanen Kadavermodell
demonstrieren [115]. Hierfür wurde ein Instrumentenarm über einen suprahyoidalen Hilfsschnitt zunächst
in der Vallecula platziert ([Abb. 6d]). Das Kamera-System und der zweite Instrumentenarm wurden transoral eingeführt.
So konnten die Hirnnerven IX–XII, die Arteria carotis und die Vena jugularis an ihrem
Eintritt in die Schädelbasis detailliert dargestellt und manipuliert werden.
Zusammenfassend ist die klinische Anwendung aller oben beschriebenen Systeme für die
Nasennebenhöhlen- und Schädelbasischirurgie bisher nicht praktikabel [177]. Die maßgeblichen Limitierungen umfassen das Fehlen eines Bohrers und einer Absaugvorrichtung
sowie der extensive Durchmesser der Arbeitsinstrumente (> 4 mm). Außerdem ist das
fehlende haptische Feedback an der Schädelbasis aufgrund der wechselnden Knochen-
und Weichteilstrukturen von besonderem Nachteil.
7. Schilddrüse
In der Schilddrüsen-Chirurgie ist neben dem offenen Zugangsschnitt auch der transaxilläre,
endoskopische Zugang weit verbreitet, der besonders in fokussierten Zentren an großen
Patientenkollektiven beschrieben worden ist (n=581) [72]. Mit Einführung des DaVinci®-Systems konnte 2005 auch erstmals die Roboter-assistierte Schilddrüsen-Operation
über einen transaxillären Zugang bei einem Patienten mit solitärem Schilddrüsen-Knoten
durchgeführt werden [107]. Besonders in der Region Südostasien besteht eine große Nachfrage für die Roboter-assistierte
Schilddrüsen-Operation, da die offen sichtbare Narbe im Jugulum dort als extrem störend
empfunden wird. Dementsprechend können die Operateure aus dieser Region auch gute
Ergebnisse in Kohorten mit tausenden von Patienten aufweisen [9]
[99]. Aber auch nicht-asiatische Arbeitsgruppen verwenden diesen Zugang in deutlich geringeren
Fallzahlen mit überwiegend nicht-malignen Erkrankungen [1]
[90]
[92].
Mehrere südkoreanische nicht-randomisierte Studien vergleichen die Vor- und Nachteile
verschiedener chirurgischer Zugänge in der Schilddrüsenchirurgie. Lee et al. zeigten
in einer onkologischen Multicenter-Studie für die Roboter-assistierte Gruppe eine
signifikant kürzere Operationszeit bei totaler Thyroidektomie als für die endoskopisch
operierte Vergleichsgruppe [100]. Der kombinierte transaxilläre/transpectorale Zugang verspricht allerdings keine
operativen Vorteile, sondern nur ein nachteiliges kosmetisches Resultat [165]. Der Langzeitverlauf von postoperativen Stimmbeschwerden wurde von Song et al. in
einer nicht-randomisierten Studie untersucht. In diesem Patientenkollektiv erholten
sich eventuelle Stimmbeschwerden nach Schilddrüsenchirurgie nach Angaben der Operateure
in der Roboter-assistierten Gruppe schneller als nach offener Chirurgie [166]. Die Patienten wurden hierfür über einen Zeitraum von 2 Jahren mittels Fragebogen
untersucht.
Die Komplikationen des transaxillären Zugangs sind gut dokumentiert und beinhalten
unter anderem persistierende Hypokalziämie (1,1%) und dauerhafte Rekurrensparese (0,27%).
Die Roboter-assoziierten Komplikationen waren Hautperforationen im Zugangsbereich
(0,1%) und Lagerungsschäden der oberen Extremität (0,13%) (n=3,000) [9]. Speziell für die transaxilläre Schilddrüsen-Chirurgie wurde von einer japanischen
Arbeitsgruppe ein Wundsperrer mit integrierter Kamera entwickelt [68]. Dieser erleichtert die Anlage des subkutanen Zugangstunnels, bevor das DaVinci-System
angelegt wird.
Bei Karzinom-Patienten, welche sowohl eine Thyroidektomie als auch eine Neck dissection
benötigen, können beide Prozeduren über den transaxillären Zugang durchgeführt werden.
Alternativ wird der gesamte Eingriff über einen beidseitigen retroaurikulären Zugang
durchgeführt, was laut Terris et al. in einer kürzeren Operationszeit und schnelleren
Erholung der Patienten resultiert (n=15) [174]. Die Vorteile des retroaurikulären Zugangs auch für die Schilddrüsen-Chirurgie konnten
später durch weitere Untersuchungen bestätigt werden (n=90) [26]
[44]. Prinzipiell ist die totale Thyroidektomie und beidseitige zentrale Neck dissection
über einen einseitigen retroaurikulären Zugangsschnitt durchführbar, was dann aber
mit einer deutlich längeren Operationszeit verbunden ist [25].
Der transorale Zugangsweg zur Schilddrüse wurde von amerikanischen und südkoreanischen
Arbeitsgruppen mit dem Ziel entwickelt, vollständig auf sichtbare Hautnarben verzichten
zu können [149]. Die endoskopische sublinguale Thyroidektomie wurde erstmals durch Benhidjeb 2009
beschrieben [11] und in Kadaverstudien auch für die Roboter-assistierte Chirurgie adaptiert [150]. Im Rahmen der technischen Weiterentwicklung wurde der enorale Zugang vom sublingualen
Raum in das Vestibulum verlegt und hierdurch die Interferenz der Instrumente mit den
Kieferknochen deutlich reduziert [150]. Bei diesem Zugang muss allerdings die transiente Alteration des Nervus mentalis
berücksichtigt werden, welche sich im Normalfall nach wenigen Wochen zurückbildet
[98]
[153].
Eine angeregte Diskussion wurde durch eine Publikation von Lee et al. entfacht, welche
Patienten nach Roboter-assistierter Schilddrüsen-Chirurgie ein verbessertes Körperbewusstsein
zuschreibt [102]. Auf der einen Seite muss berücksichtigt werden, dass die Studie in einer jungen,
nicht-randomisierten asiatischen Patientengruppe durchgeführt wurde und die Beobachtungen
nur bedingt auf andere Kulturkreise übertragbar sind [105]. Auf der anderen Seite ist besonders bei Karzinom-Patienten abzuwägen, welchen Stellenwert
die kosmetische Erscheinung gegenüber der onkologischen Sicherheit während des Eingriffs
einnehmen darf. Hierzu konnte die qualitativ hochwertige und detaillierte Meta-Analyse
von Chai et al. in Bezug auf die onkologische Sicherheit keinen Nachteil für die Roboter-assistierte
Chirurgie identifizieren, so dass der Eingriff zumindest für erfahrene Operateure
mit hohen Fallzahlen als sicher angesehen werden kann [30].
8. Halsweichteile
Ebenso wie bei der Schilddrüsen-Chirurgie wird auch die Entwicklung der Roboter-assistierten
Neck dissection (RAND) stark von den südkoreanischen Arbeitsgruppen dominiert. Besonders
an der Yonsei Universität in Seoul werden RAND-Eingriffe sowohl von den Kollegen der
HNO als auch der Chirurgie durchgeführt. Auch hier sind hauptsächlich kosmetische
Bedürfnisse die treibende Kraft, welche sich in unseren Kulturkreisen nicht widerspiegeln.
Aktuell werden 4 verschiedene Zugänge zur RAND beschrieben ([Abb. 7]) [200]; (I) transaxillär, (II) retroaurikulär, (III) der kombinierte transaxilläre und
retroaurikuläre TARA-Zugang, sowie (IV) transoral.
 Abb. 7 Die Roboter-assistierte Neck dissection ist über einen transoralen, retroaurikulären
oder transaxillären Zugangsweg durchführbar Copyright: Schuler PJ.
Abb. 7 Die Roboter-assistierte Neck dissection ist über einen transoralen, retroaurikulären
oder transaxillären Zugangsweg durchführbar Copyright: Schuler PJ.
Der transaxilläre Zugang wurde erstmals durch Kang et al. 2010 in 33 Patienten mit
Schilddrüsenkarzinom und zervikaler Metastasierung beschrieben [73]. Die unilaterale modifiziert-radikale Neck dissection wurde gemeinsam mit der beidseitigen
Thyroidektomie durchgeführt. Das operative Vorgehen ist in der oben genannten Publikation
detailliert beschrieben. Die durchschnittliche Anzahl der entfernten Lymphknoten war
6,1±4,4 im medialen und 27,7±11,0 im lateralen Kompartment. Der transaxilläre Zugangsweg
bietet sich bei Schilddrüsenkarzinomen an, ist aber bei Kopf-Hals-Karzinomen aufgrund
des langen Tunnels zu den kraniellen Lymphknotenstationen nicht praktikabel. Der alternative
retroaurikuläre Zugang über einen modifizierten Facelift-Schnitt konnte erstmals durch
Blanco et al. 2012 in einer Kadaverstudie beschrieben werden [14]. Anschließend wurden im Rahmen einer prospektiven, nicht-randomisierten klinischen
Studie in Südkorea 26 Patienten mit Oropharynx-Karzinom ohne zervikale Metastasierung
entweder der retroaurikulären RAND oder der konventionellen, offenen Chirurgie zugeteilt
(NCT01488669, [Tab. 1]). Interessanterweise waren die Komplikationsraten und die Anzahl der entfernten
Lymphknoten in beiden Gruppen gleich [97]. Sehr ähnliche Studien, welche diese Ergebnisse bestätigen, sind später für Patienten
mit Kopf-Hals-Karzinom mit und ohne zervikale Lymphknoten-Metastasen (cN0/cN+) publiziert
worden [78]
[106]
[172]. Wenig überraschend war die signifikant verlängerte Operationszeit für die RAND-Gruppe
in allen Studien. Allerdings wird die Operationszeit bei RAND-Eingriffen durch entsprechendes
Training deutlich reduziert. In der Publikation von Kim et al. wurden 90 Kopf-Hals-Karzinom-Patienten
durch einen einzigen Operateur mittels RAND operiert [77]. Sowohl in der Gruppe der modifiziert radikalen Neck dissection als auch bei der
supraomohyoidalen Neck dissection konnte die Operationszeit im Verlauf der Studie
signifikant reduziert werden (298 -> 212; 226 -> 106 Min).
Tab. 1 Aktuelle klinische Studien zur Roboter-assistierten Chirurgie im Kopf-Hals-Bereich
(www.clinicaltrials.gov).
|
Studien-#
|
Land
|
Zeitraum
|
Status
|
Inhalt
|
Patientenzahl
|
|
Fallserien
|
|
S1
|
NCT00473564
|
USA
|
2007–2015
|
geschlossen
|
TORS, Fallserie, DaVinci
|
36
|
|
S2
|
NCT02262247
|
USA
|
2014–2015
|
geschlossen
|
TORS, FLEX®-System
|
80
|
|
S3
|
NCT01059357
|
USA
|
2010–2014
|
geschlossen
|
TORS, Fallserie, DaVinci
|
60
|
|
S4
|
NCT01819480
|
USA
|
2013–2019
|
offen
|
TORS, Fallserie, DaVinci
|
85
|
|
S5
|
NCT02225496
|
USA
|
2014–2019
|
offen
|
TORS, Fallserie, DaVinci
|
140
|
|
S6
|
NCT01473784
|
USA
|
2007–2020
|
offen
|
TORS, Fallserie, DaVinci
|
360
|
|
S7
|
NCT02159703
|
USA
|
2014–2017
|
offen
|
Radiatio nach TORS (HPV+)
|
60
|
|
S8
|
NCT02072148
|
USA
|
2014–2019
|
offen
|
Radiatio nach TORS (HPV+)
|
200
|
|
S9
|
NCT03107182
|
USA
|
2017–2020
|
offen
|
Induktion vor TORS oder RCT
|
56
|
|
S10
|
NCT02760667
|
USA
|
2015–2020
|
offen
|
Induktion vor TORS oder TLM
|
20
|
|
S11
|
NCT01187160
|
USA
|
2009–2014
|
geschlossen
|
Schlafapnoe-Syndrom
|
75
|
|
S12
|
NCT01107795
|
USA
|
2010–2019
|
offen
|
Schlafapnoe-Syndrom
|
75
|
|
S13
|
NCT02269020
|
Frankreich
|
2015–2018
|
offen
|
Neck dissection
|
3
|
|
S14
|
NCT02274493
|
USA
|
2015–2019
|
offen
|
Latissimus Transplantat
|
15
|
|
S15
|
NCT02743442
|
Frankreich
|
2016–2017
|
offen
|
Hypophysen-OP
|
8
|
|
S16
|
NCT02792322
|
USA
|
2016–2018
|
offen
|
TORS in sitzender Position
|
50
|
|
S17
|
NCT02517125
|
Frankreich
|
2015–2025
|
offen
|
DaVinci System (Xi)
|
150
|
|
S18
|
NCT03010813
|
Hong Kong
|
2016–2017
|
offen
|
DaVinci System (SP)
|
60
|
|
S19
|
NCT01488669
|
Südkorea
|
2011–2013
|
geschlossen
|
Neck dissection
|
26
|
|
Randomisierte Studien
|
|
S20
|
NCT01898494
|
USA
|
2013–2023
|
offen
|
TORS und Radiatio
|
377
|
|
S21
|
NCT02002182
|
USA
|
2013–2019
|
offen
|
Vakzinierung vor TORS
|
30
|
|
S22
|
NCT02292914
|
Brasilien
|
2014–2017
|
offen
|
TORS vs. Standard Chirurgie
|
1120
|
|
S23
|
NCT02984410
|
Europa
|
2017–2020
|
offen
|
Radiatio vs. Chirurgie (mit TORS)
|
170
|
|
S24
|
NCT01590355
|
Kanada
|
2012–2021
|
offen
|
Radiatio vs. TORS
|
68
|
Durch die positiven Erfahrungen der Operateure mit der RAND-Technik konnte die Indikation
auch auf nicht-onkologische Patienten erweitert werden. So zeigten Lee et al. in einer
nicht-randomisierten, prospektiven Studie die Möglichkeiten der Roboter-assistierten
(n=13) und der endoskopischen Submandibulektomie (n=22) auf [96]. Beide Verfahren erfolgten mit retroaurikulärem Zugangsschnitt und dauerten mit
63 bzw. 65 Min in etwa gleich lang. Kein Eingriff musste in einen offenen Zugang konvertiert
werden und die kosmetischen Ergebnisse zeigten keinen signifikanten Unterschied.
Wie oben beschrieben ist der retroaurikuläre Zugang dem transaxillären Zugang bei
der Neck dissection in den kranialen Lymphknoten-Kompartimenten überlegen. Ist eine
ausgedehnte Neck dissection in den kranialen und kaudalen Kompartimenten geplant,
so kann, wie von Kim et al. beschrieben, die Kombination aus transaxillärem und retroaurikulärem
Zugang sinnvoll sein (n=7) [80]. Der kombinierte Zugang wird sowohl bei Patienten mit Kopf-Hals-Karzinom als auch
bei Schilddrüsen-Karzinomen durchgeführt und dauert länger als der konventionelle,
offene Zugang, produziert dafür aber vorteilhafte kosmetische Ergebnisse (n=22) [79]. Die weitere Entwicklung zeigt, dass auch die beidseitige Thyroidektomie und modifiziert-radikale
Neck dissection über einen einzigen ipsilateralen retroaurikulären Zugangsschnitt
Roboter-assistiert durchgeführt werden kann (n=4) [25]. Da die Operationsdauer regelmäßig bei über 5 Stunden lag, muss allerdings die Sinnhaftigkeit
und besonders die onkologische Sicherheit der Prozedur in Frage gestellt werden. Im
europäischen Raum wird das kosmetische Ergebnis besonders nach onkologisch motivierter
Operation nicht ähnlich hoch bewertet, wie in asiatischen Kulturkreisen. Viel mehr
werden in unserem Raum die bestmöglichen onkologischen Resektionsgrenzen gegenüber
kosmetischen Bedenken bevorzugt. Daher werden die Roboter-assistierte Schilddrüsen-Operation
und Neck dissection nicht regelmäßig angeboten.
Abschließend wurde durch verschiedene Arbeitsgruppen die Bedeutung der retropharyngealen
Lymphknotengruppe bei Patienten mit Kopf-Hals-Karzinom hervorgehoben. Byeon et al.
zeigten 2013, dass die transorale Neck dissection im retropharyngealen Kompartiment
sicher und effektiv durchgeführt werden kann (n=5) [24]. Die Lymphknoten-Exstirpation erfolgte jeweils in der Tiefe des Wundbetts nach Resektion
eines Tonsillen- oder Hypopharynx-Karzinoms. Obwohl jeweils nur einer oder 2 Lymphknoten
reseziert werden konnten, zeigten 4/5 Patienten einen Tumorbefall dieser Lymphknoten.
Später wurden diese Ergebnisse durch eine amerikanische Arbeitsgruppe bestätigt (n=30)
[178]. Weiterhin unklar ist der ideale zeitliche Abstand zwischen Resektion des Primärtumors
und indizierter Neck dissection. Bei Tumoroperationen mittels TORS ist für die Neck
dissection eine aufwendige Umlagerung des Patienten und oft auch ein Wechsel des Operationsraums
notwendig, was in vielen Fällen bisher nicht praktikabel ist. Frenkel et al. zeigten
nun für den Raum New York im Zeitraum 2008–2012, dass die Neck dissection in 76% der
Fälle zeitgleich mit der TORS-basierten Tumorresektion durchgeführt wurde. Bei allen
anderen Patienten erfolgte die Neck dissection entweder im Vorfeld (4%) oder 2-zeitig
nach der Tumoroperation (20%).
9. Haptik
Die aktuellen Robotersysteme haben den Nachteil, dass sie keine oder nur sehr begrenzt
haptische Information an den Operateur weiterleiten können [182]. Die fehlende Haptik kann aber oft durch die visuelle Kompensation sehr gut ausgeglichen
werden, was zu einer niedrigen Akzeptanz der haptischen Feedback-Systeme führt [117]. Besonders wenn das Roboter-System eine 3D-Bildgebung besitzt, ist die erhöhte Kraftaufwendung
im Allgemeinen durch die Deformation des Gewebes erkennbar. Ebenso wird die Steifigkeit
durch eine ausbleibende Gewebedeformation angezeigt. Auf der anderen Seite kann die
fehlende Haptik z. B. dazu führen, dass Knoten während eines Eingriffs zu locker sitzen
oder Fäden auch von erfahrenen Operateuren abgerissen werden [12]. Auch wird vermutet, dass die fehlende Haptik bei endovaskulären Roboter-Eingriffen
zu einem erhöhten Risiko einer Gefäßverletzung führt [6]. Bei der Auswertung von laparoskopischen Eingriffen, welche durch angehende Chirurgen
durchgeführt worden waren, konnte gezeigt werden, dass über die Hälfte aller Fehler
durch überschießende Kraftanwendung verursacht wurde [173]. Leider fehlen entsprechende Untersuchungen im HNO-Bereich. Trotzdem könnten diese
Fehler durch entsprechendes haptisches Feedback zumindest teilweise verhindert werden.
Unsere Arbeitsgruppe konnte in einem ex vivo Experiment zeigen, dass auch mit dem
DaVinci-System der Druck und das Drehmoment auf das Gewebe im Operationsbereich mehrfach
erhöht ist im Vergleich zu konventionellen starren Instrumenten und auch zu gebogenen
Instrumenten ([Abb. 8]). Die Probanden des Experiments mussten mit verschiedenen Instrumenten Teile eines
Silikonkissens unter kontinuierlicher Kraftmessung resezieren. Diese verstärkte Krafteinwirkung
auf das Gewebe kann eine erhöhte Verletzungsgefahr mit erhöhter Morbidität des Patienten
bewirken.
 Abb. 8 In experimentellen Studien ist die intraoperative Druckentwicklung mit dem Roboter-System
signifikant höher als mit konventionellen Instrumenten. Copyright: Schuler PJ.
Abb. 8 In experimentellen Studien ist die intraoperative Druckentwicklung mit dem Roboter-System
signifikant höher als mit konventionellen Instrumenten. Copyright: Schuler PJ.
Zunächst besteht die Frage, wie das Roboter-System die Charaktereigenschaften des
Gewebes aufnehmen kann ([Abb. 9]). Im einfachsten Fall geschieht dies über kapazitive Drucksensoren, in denen sich
bei Druckeinwirkung die elektrische Kapazität verändert und ein elektrisches Signal
weitergeleitet wird. Auf ähnliche Weise wird die Verbiegung von Instrumenten bei seitlichem
Druck gemessen und signalisiert [154]. Für das DaVinci-System konnten diese Überlegungen schon relativ weit umgesetzt
werden. Kim et al. haben Drucksensoren in die Innenseite einer DaVinci-Pinzette integriert,
über welche ex vivo die Druckeinwirkung in 4 Freiheitsgraden gemessen werden kann
[76]. In einem in vivo Tiermodell konnten Wottawa et al. zeigen, dass schon die Übermittlung
des eindimensionalen Gewebedrucks an den Operateur die Gewebeschädigung signifikant
reduziert [195]. Moderne Systeme kombinieren mehrere Sensoren in einem Instrument, wie z. B. kapazitive
Folien und Flüssigkeiten, sowie Temperatursonden, um den Informationsgehalt zu erhöhen
[138]. Prinzipiell können die Gewebeeigenschaften auch über den piezoelektrischen Effekt
oder optoelektronische Sensoren gemessen werden [69]
[128]. Allerdings befinden sich diese Technologien noch in der Grundlagenentwicklung ohne
klinische Anwendung.
 Abb. 9 Das Roboter-System hat eine sensorische Komponente mit der Informationen über das
Gewebe gewonnen werden. Über das haptische Interface interagiert das System mit dem
Operateur. Die visuelle Kompensation kann Defizite des Roboter-Systems teilweise ausgleichen.
Eine virtuelle Barriere kann mithilfe einer CT/MRT-Bildgebung festgelegt werden. Copyright:
Schuler PJ.
Abb. 9 Das Roboter-System hat eine sensorische Komponente mit der Informationen über das
Gewebe gewonnen werden. Über das haptische Interface interagiert das System mit dem
Operateur. Die visuelle Kompensation kann Defizite des Roboter-Systems teilweise ausgleichen.
Eine virtuelle Barriere kann mithilfe einer CT/MRT-Bildgebung festgelegt werden. Copyright:
Schuler PJ.
Auf der anderen Seite müssen die gemessenen Signale an den Operateur weitergeleitet
werden. Bei genauerer Betrachtung können hierbei 2 verschiedene Entitäten unterschieden
werden, wie der menschliche Körper haptische Signale empfangen kann. Zum einen werden
propriozeptive Signale wahrgenommen, welche hauptsächlich über Rezeptoren in den Muskeln
und Sehnen aufgenommen werden und Information über die Lage, Kraft und Bewegung des
Körpers beinhalten. Auf der anderen Seite werden taktile Signale über die Hautrezeptoren
aufgenommen, welche Informationen über Druck, Vibration, Wärme und Schmerz verarbeiten
[132]. Bei den konventionellen nicht-robotischen Operationstechniken schöpft der Operateur
mithilfe seiner Finger beide Informationskanäle vollständig aus, indem er das Gewebe
ausgiebig palpiert. Auch die neuen Roboter-Systeme können in der Theorie taktile Signale
an den Operateur weiterleiten. Hierzu sind allerdings komplizierte Apparaturen, wie
elektromagnetische Nadeln, temporär verformbare Gewebe, piezoelektrische Kristalle,
pneumatische Pumpen oder Wärmesysteme notwendig [10].
Verschiedene präklinische Aufbauten zeigen, dass das taktile Feedback die applizierten
Kräfte während einer Prozedur deutlich reduzieren kann. Hierbei ist es unerheblich,
ob die Signale mittels pneumatischem Ballon-Interface oder mittels Vibrationsmotor
übermittelt werden [104]
[138]. Aber die Umsetzung ist aufwendig, und die interindividuellen Unterschiede in der
Wahrnehmung sind sehr unterschiedlich ausgeprägt. Zusätzlich gelten die strengen hygienischen
Anforderungen bei der Reinigung der Instrumente auch für die taktilen Apparate, was
den regelmäßigen Einsatz nochmals erschwert. Daher beschränken sich aktuelle Bemühungen
hauptsächlich auf den propriozeptiven Informationskanal, wobei je nach Stärke des
Signals die Bewegungen des Operateurs am Manipulator mithilfe von elektrischen Motoren
gebremst oder eingeschränkt werden [132]. Diaz et al. prüften den Ansatz, ob ein haptisches Signal über ein zusätzliches
Fußpedal an den Operateur gesendet werden kann [42]. Allerdings hat sich auch diese Methode bislang nicht durchsetzen können.
Neben den propriozeptiven und taktilen Signalen können Roboter-Systeme Informationen
auch über auditive und visuelle Sinneskanäle an den Operateur übertragen ([Abb. 9]). Die Arbeitsgruppe von Okamura et al. rüstete ein DaVinci-System mit einer zusätzlichen
Ton- und Bildanzeige aus, welche dem Operateur die applizierten Kräfte übermittelte.
So konnten sie zeigen, dass die Fäden beim Knoten mit visuellem Feedback seltener
rissen und die Konsistenz der Kräfte mit dem DaVinci-System sogar besser als mit der
Hand war [81]
[146]. Ebenso konnten Ly et al. die Vorteile des akustischen Feedbacks darstellen, wenn
es mit einer sensorischen Pinzette gekoppelt wurde [110].
Eine alternative Feedback-Methode sind virtuelle Barrieren, welche anhand von präoperativ
erstellten Bildgebungen festgelegt werden. Die Barrieren markieren wichtige anatomische
Landmarken, wie z. B. große Blutgefäße, und der Operateur kann seine Instrumente nicht
über diese Grenzen hinwegbewegen [19]. Ähnlich wie bei den haptischen Feedback-Mechanismen werden die Instrumente an den
virtuellen Barrieren mithilfe der elektronischen Motoren des Roboter-Systems blockiert.
Zusammenfassend ist der Vorteil der haptischen Feedback-Systeme zum heutigen Zeitpunkt
vielfach nachgewiesen worden. Der regelmäßige Einsatz wird aber erschwert durch die
technischen, finanziellen und hygienischen Herausforderungen [46].
10. Kosten
Aufgrund des materiellen Mehraufwandes ist der finanzielle Mehraufwand bei roboterunterstützten
Operationen erheblich. Da das DaVinci-System lange das einzige zugelassene System
war, liegen bisher nur hier detaillierte Kostenanalysen vor. Nach Berechnungen von
Dombree et al. liegen die Kosten für eine totale Laryngektomie in Belgien um ca. 90%
höher (3,581 vs. 6,767 Euro), wenn eine Roboter-assistierte Operation durchgeführt
wird [43]. Während bei den Roboter-Operationen die Kosten für das System und die spezifischen
Instrumente am meisten ins Gewicht fallen, sind dies bei den konventionellen Eingriffen
die Personalkosten. Eine Kostenäquivalenz kann laut den Autoren auch dann nicht erreicht
werden, wenn für die Berechnung die Anzahl der operierten Patienten maximiert und
die Operationsdauer minimiert wird. Unterstützt wird diese Ungleichheit der Kosten
dadurch, dass die Hersteller der Robotersysteme grundsätzlich ein Monopol für die
Operationsinstrumente haben, welche jeweils nur mit dem eigenen System verwendet werden
können [64]. Auch im japanischen Krankenkassensystem werden die zusätzlichen Ausgaben der Roboter-Chirurgie
kritisch gesehen. So muss ein Zentrum jährlich mindestens 300 Roboter-assistierte
Mediastinoskopien durchführen, damit die Kostenäquivalenz gegenüber den Video-assistierten
Eingriffen erreicht werden kann [71]. Ebenso konnte in Deutschland für die Roboter-assistierte Prostatektomie aufgrund
der hohen Materialkosten keine Kosteneffektiviät nachgewiesen werden [17]. In den USA scheinen die Verhältnisse weniger deutlich zu sein. So konnte laut Byrd
et al. für die Roboter-assistierte Panendoskopie bei ,Cancer of unknown Primary‘ (CUP)
die Kosteneffektivität erreicht werden, da sich hierdurch eine höhere Wahrscheinlichkeit
ergibt, den Primarius zu finden [27]. In den 206 retrospektiv untersuchten Patienten waren die anfallenden Folgekosten
entsprechend geringer. Für Patienten mit obstruktivem Schlafapnoe-Syndrom (n=104)
konnten Golbin et al. im Vergleich zu konventionell operierten Patienten aber eine
deutliche Zunahme der Kosten um durchschnittlich 14708 USD feststellen, wenn die Patienten
mit TORS operiert wurden [58].
Eine weitere Möglichkeit, um die Kosteneffektivität von Roboter-Systemen zu überprüfen,
ist die Anwendung von Markov-Modellen, welche versuchen über stochastische Prozesse
das Eintreffen von bestimmten Ereignissen vorherzusagen. Auch hier besteht Uneinigkeit
über die Kosteneffektivität von Roboter-Systemen. So beschreiben Almeida et al. eine
durchschnittliche Kosteneinsparung von 1366 USD und eine Zunahme der qualitätsadaptierten
Lebensjahre (QALY) um 0,25 für Oropharynx-Karzinome im Vergleich zu primärer Radiochemotherapie
[39]. Die Differenz zugunsten von TORS kann laut den Autoren weiter verbessert werden,
wenn die Rate der adjuvanten Radiatio in der TORS Gruppe durch sinnvolle Patientenselektion
minimiert wird. Eine ähnliche Studie von Rodin et al. zeigte eine vergleichbare Zunahme
der QALY um 0,63 für Patienten mit Oropharynx-Karzinome in Kanada [151]. Allerdings war die primäre Radiochemotherapie mit 123000 USD deutlich günstiger
als die TORS-Therapie mit 178000 USD, welche eine eventuelle adjuvante Therapie miteinschließt.
Zwei weitere Publikationen mit ähnlichem Studienaufbau für Oropharynx-Karzinome sehen
die Roboter-Therapie eher im Nachteil. So zeigten Rudmik et al. eine Erhöhung der
Kosten um 4959 USD im Vergleich zur primären Radiochemotherapie ohne Zunahme der QALY
[152]. Noch deutlicher fiel der finanzielle Nachteil für TORS-Eingriffe in den Berechnungen
von Sher et al. aus, welche die Mehrbelastung mit 12100 USD bezifferten ohne eine
Veränderung der QALY zu sehen [162]. Alle Markov-Model Studien stammen aus dem nordamerikanischen Raum, sodass im Wesentlichen
die gleichen Berechnungsgrundlagen vorlagen.
Ein großer Kostenvorteil für TORS-Patienten wurde in einer retrospektiven Studie von
Richmon et al. mit 9601 Patienten errechnet [148]. Der Kostenvorteil entstand hierbei nicht durch den Eingriff selbst, sondern durch
die verkürzte Krankenhausliegezeit und die verringerte Anzahl von Magensonden und
Tracheostomien in der TORS-Gruppe. Da es sich um eine nicht-randomisierte Studie handelte,
wurden gesündere Patienten möglicherweise mit einer höheren Wahrscheinlichkeit der
TORS-Gruppe zugeteilt, was die Ergebnisse verfälschen kann. In einer zweiten, ähnlichen
Studie von Chung et al. mit 2067 Patienten wurde dieses Problem bei der Auswertung
der Daten berücksichtigt. Trotzdem zeigte die Gruppe, welche mit offener Chirurgie
behandelt wurde, eine längere Liegezeit, höhere Kosten, sowie eine höhere Anzahl von
Magensonden und Tracheostomien als die TORS-Gruppe [34]. Die TORS-Gruppe zeigte hingegen ein höheres Risiko für Dysphagie. Zusätzlich sollte
berücksichtigt werden, dass die Kosten des Eingriffs auch von der Wahl der Instrumente
durch den Operateur beeinflusst werden. So sind z. B. flexible Laserfasern besonders
kostenintensiv und können nicht wiederaufbereitet werden [64]. Laut eigener Berechnungen, entstehen bei einem Eingriff mit dem DaVinci-System
zusätzliche Kosten von über 6000 Euro. Anschaffungs- und Wartungsgebühren sind in
diesen Kosten anteilsmäßig berücksichtigt und werden in Deutschland bisher nicht über
ein spezielles Entgelt für ,neue Untersuchungs- und Behandlungsmethoden‘ (NUB) rückerstattet
[113]. Die aktuellen Anschaffungskosten für das DaVinci-System liegen bei ca. 2 Millionen
USD (Xi Model) und ca. 150000 USD jährliche Wartungsgebühr. Die Anschaffung des Flex-Systems
kostet aktuell ca. 800000 USD. Je nach Anzahl der jährlich durchgeführten Roboter-gestützten
Operationen lässt sich der Preis pro Eingriff entsprechend senken.
11. Fallzahlen
Um die Bedeutung von TORS in das gesamte Umfeld der Roboter-Chirurgie besser einordnen
zu können, erscheint die Betrachtung der Systemverteilung und der fächerübergreifenden
Fallzahlen sinnvoll. Zuverlässige Zahlen können den Jahresberichten der Firma Intuitive
Surgical entnommen werden [67]. Letztes Jahr waren weltweit 3803 DaVinci-Systeme installiert. Neben den 2501 Systemen
in den USA waren weitere 644 Systeme in Europa und 476 Systeme in Asien installiert.
182 weitere Systeme entfallen auf andere Kontinente wie Afrika, Südamerika und Australien
([Abb. 10a]). Ebenso sind die aktuellen Verkaufszahlen stark vom amerikanischen Krankenhausmarkt
dominiert. So werden regelmäßig über die Hälfte aller verkauften Systeme in die USA
geliefert ([Abb. 10b]). Diese ungleiche Verteilung der Systeme spiegelt sich auch in der Anzahl der durchgeführten
Prozeduren wider. [Abb. 10c] zeigt die Entwicklung der Fallzahlen für den Zeitraum ab 2011. Für den amerikanischen
Markt zeigt sich in diesem Zeitraum nahezu eine Verdopplung der Roboter-assistierten
Eingriffe. Interessanterweise scheint aber für die Fachgebiete Gynäkologie und Urologie
seit mehreren Jahren ein stabiles Plateau erreicht zu sein. Das amerikanische Wachstum
basiert somit hauptsächlich auf der anhaltenden Zunahme der Fallzahlen in der Allgemeinchirurgie,
welche mittlerweile die urologischen Eingriffe deutlich übertreffen. Auch ist das
Verhältnis des amerikanischen Marktes zum übrigen Weltmarkt sehr aufschlussreich.
Zwar zeigt sich in den anderen Ländern auch ein stetiges Wachstum der Fallzahlen.
Diese liegen aber insgesamt bei nur etwa einem Drittel der amerikanischen Eingriffe.
Die Fallzahlen für die Kopf-Hals-Chirurgie sind selbst in den USA so gering, dass
dieses Fachgebiet in den Jahresberichten von Intuitive Surgical keine Beachtung finden.
Unter Betrachtung dieser Zahlen scheint es verständlich, dass die Weiterentwicklung
des DaVinci-Roboters speziell für Kopf-Hals-Eingriffe nicht im wirtschaftlichen Fokus
des Herstellers liegt.
 Abb. 10 a Die meisten DaVinci-Systeme sind in den USA installiert. b Ebenso steigt die Zahl der jährlich verkauften DaVinci-Systeme in den USA weiterhin
an. c Korrelierend dazu nimmt besonders in den USA die Anzahl der Roboter-assistierten
operativen Eingriffe weiter zu. Copyright: Schuler PJ .
Abb. 10 a Die meisten DaVinci-Systeme sind in den USA installiert. b Ebenso steigt die Zahl der jährlich verkauften DaVinci-Systeme in den USA weiterhin
an. c Korrelierend dazu nimmt besonders in den USA die Anzahl der Roboter-assistierten
operativen Eingriffe weiter zu. Copyright: Schuler PJ .
12. Risiken
In der Literatur erscheinen immer wieder einzelne Fallberichte, in denen der Bruch
eines Instrumentenarms während eines Roboter-assistierten Eingriffs beschrieben wird
[82]. Diese Publikationen verdeutlichen, dass der Einsatz von Robotern neue Risiken für
den Patienten birgt, welche in dem präoperativen Aufklärungsgespräch diskutiert werden
müssen. Die einwirkenden Kräfte eines Roboter-Systems sind z. T. erheblich. So konnte
die Auflast, welche durch das Endoskop eines DaVinci® Systems generiert werden kann, in einer in vitro Messung auf über 7kg beziffert werden
[52]. Allerdings ist die Fraktur von menschlichen Knochen im Kopf-Hals-Bereich mit dem
DaVinci-System laut Hockstein et al. auch mit Absicht im Kadaverversuch nicht möglich
[61].
Beschreibungen von Komplikationen im Zusammenhang mit Roboter-Operationen werden entweder
mittels Durchsicht der eigenen Patienten-Kohorten oder durch das systematische Aufarbeiten
von Datenbanken generiert, welche entsprechende Einträge vorhalten. Eine ausführliche
Übersichtsarbeit, die ihre Informationen aus der amerikanischen MAUDE (Manufacturer
and User Facility Device Experience) Datenbank erhält, wurde kürzlich von Alemzadeh
et al. publiziert [3]. Die automatische Datenbank-Recherche konnte für den Zeitraum von 2000 bis 2013
insgesamt 10624 Roboter-assoziierte Komplikationen bei ca. 1745000 Roboter-Eingriffen
in den USA für alle Fachrichtungen identifizieren. Somit ergab sich eine Komplikationsquote
von ca. 0.6%. Die aufgelisteten Komplikationen beinhalteten unter anderem Verletzungen
des Patienten (n=1391), Todesfälle (n=144) und Systemfehler (n=8061). Über den untersuchten
Zeitraum gesehen stieg die absolute Zahl der Komplikationen in Einklang mit der steigenden
Anzahl der Roboter-Eingriffe kontinuierlich an. Allerdings überschritt auch die Komplikationsquote
im Jahr 2013 erstmals die Marke von 1%. Die Quote der Verletzungen und Todesfälle
zeigte sich seit 2007 mit durchschnittlich 0.083% relativ stabil.
Interessanterweise war die Anzahl der Todesfälle verglichen mit der absoluten Anzahl
von dokumentierten Komplikationen gerade für die Kopf-Hals-Chirurgie mit Abstand am
höchsten drei (19,7%, [Abb. 11]). Dies ist wohl neben der anatomischen Komplexität des Halsbereichs auch dem abweichenden
Dokumentationsverhalten unserer Fachrichtung geschuldet und beleuchtet einen wesentlichen
Nachteil der Datenbank-basierten Auswertung. Weiterhin erfolgte die Berechnung der
Quote von Roboter-Eingriffen mit tödlichem Ausgang im Verhältnis zu allen Roboter-assistierten
Operationen. Diese war für Eingriffe in den Fachbereichen Herz-Thorax-Chirurgie und
Kopf-Hals-Chirurgie 10-mal höher als in den Fachbereichen Gynäkologie, Urologie und
Allgemeinchirurgie (0,052% vs. 0,0057%; p<0,001). Die Ursachen für die Todesfälle
lagen fachübergreifend zu 75% (64/86) im postoperativen Zeitraum, beinhalteten Sepsis
und Blutungen und waren somit nicht direkt Roboter-assoziiert. Nur 17% der Todesfälle
traten intraoperativ auf (15/86) und waren durch die unbeabsichtigte Verletzung von
Organen (5/86), Blutung, Lungenembolie oder Herzstillstand verursacht. Sieben weitere
Fälle konnten zeitlich nicht zugeordnet werden.
 Abb. 11 Nur ein kleiner Anteil aller Roboter-assistierten Eingriffe wird in der Kopf-Hals-
Chirurgie und Herz-Thorax-Chirurgie durchgeführt. Das relative Risiko für Verletzungen
oder Todesfälle ist in diesen Disziplinen allerdings erhöht. Copyright: Schuler PJ.
Abb. 11 Nur ein kleiner Anteil aller Roboter-assistierten Eingriffe wird in der Kopf-Hals-
Chirurgie und Herz-Thorax-Chirurgie durchgeführt. Das relative Risiko für Verletzungen
oder Todesfälle ist in diesen Disziplinen allerdings erhöht. Copyright: Schuler PJ.
Ein Großteil (88%) aller gemeldeten Komplikationen basierte auf Fehlern des Roboter-Systems
und konnte unterteilt werden in Software-Fehler und Bildgebungsfehler (7,4% aller
Meldungen), Abbrechen von Geräteteilen in den Situs (14,7%), Funkenschlag (10,5%)
sowie unbeabsichtigte Instrumentenbewegung (10,1%). In Zusammenschau aller Meldungen
führten die Komplikationen in 3,1% zum System-Neustart, in 7,3% zur Umwandlung in
eine nicht-robotische Operation und in 2,5% zu einer Verlegung des Operationstermins.
Verletzungen und Todesfälle von Patienten haben oft ihre Ursache in einer Verkettung
von mehreren Komplikationen, und ein einzelner Grund kann oft nicht identifiziert
werden. Menschliches Fehlverhalten und Fehlentscheidungen spielen allerdings laut
MAUDE-Datenbank eine entscheidende Rolle. Die häufigsten menschlichen Fehler werden
wie folgt aufgelistet: Unzureichende Erfahrung in der Notfallbehandlung, unzureichendes
Training am eingesetzten Roboter-System, unzureichende Überprüfung des Systems und
der Instrumente vor dem Eingriff, unzureichende Lösung von bekannten technischen Problemen,
inkorrektes Platzieren der Instrumente, inkorrekte Einstellung der Elektrokaustik,
inkorrekte Kabelverbindungen, falsche Koordination von Hand- und Fußbewegungen, inkorrekter
Wechsel der Instrumente.
Um die beschriebenen Komplikationen zu vermeiden, werden folgende Lösungsvorschläge
angeboten: (1) Simulations-Umgebungen, in denen der Umgang mit Komplikationen ausreichend
in einer sicheren Umgebung trainiert werden kann; (2) Intraoperative Echtzeit-Rückmeldung
an den Operateur über sichere Operationspfade und anatomische Grenzen; (3) Verbesserte
Dokumentationsmechanismen, welche im Falle von Komplikationen zur anschließenden Verbesserung
des Systems beitragen können.
Trotz aller technischen Risiken, welche mit dem Einsatz von Roboter-Systemen neu auftreten,
bleibt die postoperative Blutung die häufigste Komplikation bei Eingriffen im Kopf-Hals-Bereich.
So konnte Zenga et al. in einem großen Patientenkollektiv (n=509) eine Nachblutungsrate
von 3% dokumentieren, welche einer operativen Revision bedurfte [199]. Die Mehrheit der Patienten hatte die Diagnose eines Kopf-Hals-Karzinoms (75%),
andere waren aufgrund von nicht-malignen Pathologien im Kopf-Hals-Bereich operiert
worden. Eine niedrigere Nachblutungsrate von 1,7% zeigte sich in einem Kollektiv von
Patienten, welche ausschließlich an obstruktiver Schlafapnoe litten und eine Zungengrundresektion
erhalten hatten (n=243) [183]. Zwei simultan publizierte Studien suggerieren, dass die Unterbindung der A. carotis
externa bei TORS-Eingriffen nicht die Häufigkeit, aber die Intensität der postoperativen
Nachblutung reduzieren kann [57]
[87]. Diese Aussage ist gut nachvollziehbar. Viel überraschender ist aber die hohe Nachblutungsrate
mit operativer Revision, welche ohne Gefäßunterbindung bei jeweils 5,5% (n=201) und
7,8% (n=265) lag. Pollei et al. haben die Nachblutungsrate bei TORS-Eingriffen und
TLM-Eingriffen in einer retrospektiven, nicht-randomisierten Studie verglichen (n=906)
[143]. Hierbei zeigten sich ähnliche Nachblutungsraten für TORS (5,9%) und TLM (5,6%).
Allerdings wurden größere Karzinome mit höherem T-Stadium signifikant öfter mit TLM
als mit TORS operiert, sodass in dieser Studie von einem höheren Blutungsrisiko für
TORS in vergleichbaren Tumorstadien ausgegangen werden muss. Zu demselben Ergebnis
kommt eine französische, retrospektive Studie in Patienten mit Oropharynx-Karzinom
(n=514), welche neben TORS ein höheres Alter und eine antikoagulative Therapie als
signifikante Risikofaktoren für eine postoperative Nachblutung identifizieren konnten
[91]. In einer weiteren monozentrischen, retrospektiven Übersichtsarbeit konnten Hay
et al. eine Reduktion der TORS-assoziierten Komplikationen mit zunehmender Erfahrung
des Operationsteams feststellen (n=122) [60]. So wurden die schweren Komplikationen, wie Aspiration und Blutungen, über einen
Zeitraum von 5 Jahren von 33% auf 10% reduziert.
Obwohl die hygienischen Bedenken bei der Aufbereitung der Roboter-Systeme weiter in
den Fokus kommen, existieren hierzu bisher keine wissenschaftlichen Publikationen.
Bei dem DaVinci-System sind besonders die kleineren Instrumente mit 5 mm Durchmesser
betroffen, welche nach der Reinigung und Sterilisation nach Standardprotokoll weiter
Gewebereste zwischen den Bauteilen aufweisen können. Um die aufwändigen Reinigungsverfahren
zu umgehen, hat sich die Firma Medrobotics beim FLEX®-System entschieden, Einmal-Instrumente zu verwenden, welche entsprechend teurer sind.
13. Klinische Studien
Die oben beschriebenen klinischen Vorteile der Roboter-assistierten Chirurgie im Kopf-Hals-Bereich
können nur mittels klinischer Studien sinnvoll bestätigt werden. In [Tab. 1] sind die aktuellen Studien aufgelistet, wobei der geringe Anteil an prospektiv randomisierten
Studien auffällig ist. Die Daten entstammen der öffentlich zugänglichen NIH-Datenbank
(www.clinicaltrials.gov) und erheben keinen Anspruch auf Vollständigkeit.
Bereits publiziert ist eine retrospektive, mehrarmige Studie in der TORS mit offener
Chirurgie bei T1/T2 Malignomen des Oropharynx verglichen wird (S1, NCT00473564, n=36)
[41]. Untersucht wurde hierbei die Länge des Krankenhausaufenthaltes, sowie die Dauer
der Versorgung mit Tracheostoma und Ernährungssonde. TORS zeigte jeweils die besseren
Ergebnisse, wobei aufgrund des retrospektiven Studienaufbaus von einem Bias zugunsten
von TORS bei der Patientenselektion ausgegangen werden muss. Ebenso publiziert ist
die prospektive, einarmige Zulassungsstudie für das oben beschriebene Flex®-System der Firma Medrobotics (S2, NCT02262247, n=80) [94]. In dieser mehrheitlich nicht-onkologischen Patientenkohorte konnte der sichere
und effektive Einsatz des Systems im Pharynx und der Supraglottis nachgewiesen werden.
Zwei weitere Studien untersuchen die Durchführbarkeit von TORS-Eingriffen im Pharynx
und Larynx. Neben der Durchführbarkeit werden auch die Effektivität und die Lebensqualität
im Langzeitverlauf ausgewertet. Die Rekrutierungsphase der ersten Phase I Studie ist
bereits abgeschlossen, die Daten sind allerdings noch nicht publiziert (S3, NCT01059357,
n=60). Die zweite Phase I Studie ist aktuell geöffnet (S4, NCT01819480, n=85). Eine
weitere amerikanische, monozentrische, einarmige Studie untersucht neben dem onkologischen
Resultat in Patienten mit Oropharynx-Karzinom auch die Schluck- und Sprechfähigkeit
nach TORS (S5, NCT02225496, n=140). Die größte, nicht-randomisierte, einarmige Studie
zu TORS stammt ebenso aus den USA und umfasst Patienten mit malignen und benignen
Pathologien zum Nachweis der Durchführbarkeit von TORS (S6, NCT01473784, n=360).
Mit dem besonderen Wachstumsverhalten von HPV+ Tumoren beschäftigen sich 2 aktuell laufende einarmige Studien aus den USA. In TORS-behandelten
Patienten untersuchen Lin et al., ob die Region des Primärtumors bei der adjuvanten
Radiatio ausgespart werden kann ohne eine Reduktion des Überlebens zu riskieren (S7,
NCT02159703, n=60). Die SIRS-Studie evaluiert die Möglichkeit zur De-Eskalation der
adjuvanten Therapie in TORS-behandelten, HPV+ Patienten. Konnte der Primärtumor operativ
vollständig entfernt werden und liegen nicht mehr als 2 tumorinfiltrierte Lymphknoten
vor, so wird auf die adjuvante Radiatio zunächst verzichtet und die Kontrolle mittels
PET-CT durchgeführt (S8, NCT02072148, n=200).
Den Stellenwert der Induktions-Chemotherapie mit Cisplatin, Paclitaxel und Nivolumab
untersucht die OPTIMA-II Studie von Siewert et al. (S9, NCT03107182, n=56). Bei ausreichendem
Ansprechen des Tumors erfolgt nach der Induktionsphase die Roboter-assistierte Tumorexzision.
Alle anderen Patienten erhalten eine kombinierte Radiochemotherapie. Ein ähnliches
Konzept bietet die Studie von Sadeghi et al., bei der die Induktionschemotherapie
mit Cisplatin und Doxetacel durchgeführt wird (S10, NCT02760667, n=20). Die anschließende
Tumortherapie wird entweder mittels TORS oder mit transoraler Laser-Mikrochirurgie
durchgeführt.
In Patienten mit obstruktivem Schlafapnoesyndrom (OSAS) konnte eine bereits publizierte
einarmige Phase I Studie zeigen, dass die Kombination aus Roboter-assistierter Zungengrundreduktion
und Uvulopalatopharyngoplastik (UPPP) auch für bereits vor-operierte Patienten einen
klinischen Vorteil bringen kann (S11, NCT01187160, n=75) [175]. Eine ähnliche Studie zur TORS-Therapie bei OSAS-Patienten befindet sich aktuell
in der Rekrutierungsphase (S12, NCT01107795, n=75).
Eine Serie von einarmigen klinischen Studien versucht, neue Indikationsfelder für
TORS zu erschließen. Aufgrund der jeweils neuartigen Ansätze sind die Patientenzahlen
in diesen Pilotstudien sehr limitiert. So wird in einer sehr kleinen französischen
Studie der transaxilläre Zugang zur Neck dissection (Level II–IV) untersucht, welcher
aufgrund der fehlenden zervikalen Narbe kosmetisch vorteilhaft erscheint (S13, NCT02269020,
n=3). Das freie Muskeltransplantat des M. latissimus dorsi wird oft in der rekonstruktiven
Chirurgie verwendet. Das Roboter-gestützte Heben des Muskeltransplantats wird in einer
monozentrischen Pilotstudie evaluiert (S14, NCT02274493, n=15). Der Zugang zur Hypophyse
über die Sella turcica mittels TORS ist von einer französischen Arbeitsgruppe in einer
Kadaverstudie publiziert worden [32]. Die anschließende klinische Studie, in welcher der Zugang zur Sella turcica mit
den Manipulator-Armen eines DaVinci Si® demonstriert werden soll, befindet sich in der Rekrutierungsphase (S15, NCT02743442,
n=8). Moore et al. untersuchen im Rahmen einer Pilotstudie die Möglichkeit, TORS-Eingriffe
in sitzender Position durchzuführen (S16, NCT02792322, n=50). Die Autoren versprechen
sich hierdurch eine verbesserte Visualisierung des Operationsgebiets und somit eine
kürzere Operationsdauer, wie bereits in 2 Patienten durchgeführt [123]. Die technischen Weiterentwicklungen des DaVinci® Systems werden in 2 unabhängigen Studien evaluiert. Eine französische Gruppe untersucht
die Vorteile des DaVinci® Xi in einer einarmigen Phase I Studie für TORS (S17, NCT02517125, n=150). Simon et
al. testen ein neuartiges Single Port System für den Einsatz bei TORS, aber auch bei
kolorektalen und urologischen Indikationen (S18, NCT03010813, n=60). Laut Berichten
des Internet-Blogs „www.surgrob.blogspot.com“ hat Intuitive Surgical 10 Prototypen
des DaVinci SP® (single port) produziert, welche aktuell im klinischen Einsatz getestet werden. Bei
letztgenannter Studie könnte es sich daher um einen dieser Prototypen handeln.
Bereits publiziert ist die nicht-randomisierte südkoreanische Studie zur Neck dissection
bei cN0, welche den modifizierten Roboter-assistierten face-lift Zugang mit dem konventionellen
offenen Zugang vergleicht (S19, NCT01488669, n=26). Die Operationsdauer war in der
TORS-Gruppe etwa doppelt so lang (78 vs. 158 min). Die Anzahl der durchschnittlich
entnommenen Lymphknoten war allerdings vergleichbar (20 vs. 22), und das kosmetische
Resultat in der TORS-Gruppe besser [97].
Unzweifelhaft sind die vielen publizierten Fallserien und nicht-randomisierten Pilotstudien
von gewisser Bedeutung für die technische Weiterentwicklung und Erweiterung der operativen
Ansätze. Wissenschaftlich besonders aussagekräftig sind aber mit Sicherheit die folgenden
prospektiven, randomisierten klinischen Studien. Der vielfach höhere Organisationsaufwand
und die deutlich erschwerte Patientenrekrutierung dürfen hierbei nicht unterschätzt
werden. Die interventionelle Phase-II Studie von Ferris et al. erprobt die Deeskalation
der adjuvanten Radiatio in HPV+ Patienten nach operativer Tumorexzision mittels TORS
(S20, NCT01898494, n=377). Die Intensitätsmodulierte Radiatio (IMRT) wird nach der
Operation zwischen der Standard-Dosis (60 Gy) und einer erniedrigten Dosis (50 Gy)
randomisiert [65]. Die Kombination von TORS mit einer neo-adjuvanten Immuntherapie mittels Tumor-Vakzinierung
wird in der Arbeitsgruppe von Sikora et al. evaluiert (S21, NCT02002182, n=30). Die
intravenöse Lebend-Impfung wird mit genetisch modifizierten Listerien durchgeführt,
welche das HPV-spezifische Onkoprotein E7 exprimieren [35]. Nach der Impfung erhalten alle eingeschlossenen Patienten eine TORS-basierte Tumorexstirpation.
Während die beiden erstgenannten Studien die adjuvante Therapie vor oder nach TORS
randomisieren, sind die folgenden Studien speziell dafür ausgelegt, den Einsatz von
TORS gegenüber der Standardtherapie zu vergleichen.
Eine extrem große brasilianische randomisierte Phase-III Studie vergleicht die Roboter-assistierte
Operation mit der Standard-Operation für verschiedene Tumorentitäten aus allen Fachbereichen
(S22, NCT02292914, n=1120). Der gemeinsame europäische Ansatz der EORTC (European
Organisation for Reseach an Treatment of Cancer) unterscheidet nicht zwischen den
verschiedenen operativen Verfahren, wie TORS oder TLM, wenn diese mit der konservativen
Therapie mittels Radiatio randomisiert verglichen werden (S23, NCT02984410, n=170).
Eingeschlossen werden Patienten mit frühem Oropharynx-Karzinom (T1, T2), welche sich
für chirurgische und konservative Therapieverfahren qualifizieren. Den selben Ansatz
verfolgt die kanadische ORATOR-Studie ebenfalls beim frühen Oropharynx-Karzinom (S24,
NCT01590355, n=68). Allerdings ist hier TORS als alleinige operative Option vorgesehen
[127]. Diese Studien versprechen in den nächsten Jahren höchst interessante Resultate,
was den Vergleich von operativen Ansätzen inklusive TORS mit konservativen Therapiemethoden
betrifft.
Abschließend wird eine Studie beschrieben, welche die Lebensqualität im Zusammenhang
mit TORS-Therapie evaluiert. Gross et al. vergleichen in einer nicht-randomisierten,
prospektiven Studie den Aktivitätsgrad von Patienten nach TORS oder nach konservativer
Tumortherapie (S25, NCT02663583, n=44). Die Aktivität des Patienten wird mithilfe
eines elektronischen Armbandes gemessen, welches die Bewegungen des Patienten aufzeichnet.
14. Neue Technologien
Bekannterweise ist das Potenzial der Roboter-assistierten Chirurgie enorm. Da aber
gleichzeitig die hohen Erwartungen bisher noch nicht erfüllt werden konnten, lebt
die Roboter-assistierte Chirurgie von der ständigen Weiterentwicklung und Spezialisierung.
Im folgenden Abschnitt werden technische Weiterentwicklungen präsentiert, welche noch
nicht in der klinischen Routine präsent sind, die Chirurgie in naher Zukunft möglicherweise
aber mitgestalten werden.
Neben den zugelassenen Roboter-Systemen DaVinci® und FLEX® existieren zahlreiche weitere Systeme, welche sich aktuell in der präklinischen Erprobungsphase
befinden. Im Rahmen eines EU-gesponsorten Forschungsprojektes wurde das MicroRALP-System
entwickelt [114]. Dieses teilflexible Endoskop wird transoral eingeführt und ermöglicht eine 3D-Visualisierung
der Stimmlippen. Über einen interaktiven Bildschirm gibt der Operateur die Grenzen
für die Resektion vor, welche anschließend halbautomatisch durch den integrierten
Laserstrahl durchgeführt wird. Weitere Informationen finden sich auf der Projektseite
im Internet unter www.microralp.eu. Das System konnte bisher in Kadaverexperimenten
getestet werden und befindet sich zur Zeit in der Weiterentwicklung.
Die Arbeitsgruppe um Olds et al. hat in der Vergangenheit ein flexibles Endoskop entwickelt,
welches einhändig über eine Joystick gesteuert werden kann [134]. Dieses Robo-ELF System wurde speziell für die Larynxchirurgie entwickelt und gibt
dem Operateur die Möglichkeit mit der freien Hand ein zusätzliches Instrument zu bedienen
[133]. Robo-ELF wurde bisher in Kadaverexperimenten getestet, über die Weiterentwicklung
existieren aktuell keine Informationen.
Ein Single-Port-System mit dem Namen ,SPORT‘ der Firma Titan Medical® ist bereits erfolgreich für die Abdominalchirurgie in lebenden Tieren getestet worden.
Entsprechende wissenschaftliche Publikationen liegen allerdings nicht vor. Neben 2
flexiblen Armen besitzt das System einen flexiblen Kamerakopf und erinnert somit an
die neueste Single-Port-Version des DaVinci-Systems. Alle 3 Arme können nach Einführen
in den Körper trianguliert werden, um eine effiziente Arbeitshaltung zu erreichen
([Abb. 12a/b]). Es ist durchaus denkbar, dass diese Konstruktion auch Vorteile für die Kopf-Hals-Chirurgie
bringt, wenn die Ausmaße der Instrumente entsprechend angepasst werden.
 Abb. 12 a+b Das robotische SPORT-System (Titan Medical) ist im Aufbau und in der Technologie
dem DaVinci-Single Port System sehr ähnlich. c Kontinuums-Roboter können aufgrund ihrer neuartigen Technologie neue Indikationen
erschließen.
Abb. 12 a+b Das robotische SPORT-System (Titan Medical) ist im Aufbau und in der Technologie
dem DaVinci-Single Port System sehr ähnlich. c Kontinuums-Roboter können aufgrund ihrer neuartigen Technologie neue Indikationen
erschließen.
Interessant ist auch die offene Forschungsplattform, welche in USA konstruiert worden
ist. Die Plattform besteht aus Komponenten ausgedienter DaVinci-Systeme und bietet
über eine Linux-Software unbegrenzt Zugang zu der gesamten Software und Elektronik
[75]. Aktuell sind mindestens 11 Plattformen an verschiedenen Standorten installiert.
Kontinuums-Roboter bestehen aus mehreren konzentrischen Röhren, welche ineinander
verschachtelt werden [21]. Jede Röhre kann mit elektrischen Motoren unabhängig voneinander bewegt werden,
womit ein 3-dimensionaler Raum vollständig abgedeckt wird ([Abb. 12c]). Die logistische Denkarbeit, wie die Röhren zu einander stehen müssen, wird von
einem Rechner übernommen. Dieses Bewegungsmodell unterscheidet sich vollständig von
den bisherigen Roboter-Systemen und könnte dank seiner nicht-linearen Bauweise besonders
für die Nasennebenhöhlen- und Schädelbasischirurgie von Interesse sein. Mehrere Arbeitsgruppen
befassen sich mit der Entwicklung von Kontinuums-Robotern, wobei sich Wu et al. und
Burgner-Kahrs et al. auch mit den Herausforderungen im HNO-Bereich beschäftigen [23]
[196].
Auch in der Roboter-assistierten Chirurgie ist der Einsatz von Lasern zur Geweberesektion
wünschenswert. Allerdings ist die dauerhafte Fokussierung des Laserstrahls mithilfe
der Roboterinstrumente eine bisher ungelöste Herausforderung [170]. Zusätzlich fallen die Kosten für eine flexible Laserfaser zusätzlich ins Gewicht,
welche bei der klassischen mikroskopischen Laserresektion nicht auftreten [64]. Üblicherweise werden in der Kopf-Hals-Chirurgie CO2-Laser für die Resektion verwendet [112]. Alternative Laserquellen, wie der Erbium-YAG-Laser zeigen in experimentellen Ansätzen
qualitativ bessere Schneide-Eigenschaften und bessere Möglichkeiten zur Fokussierung
[169]. Somit sind diese Laserquellen möglicherweise besser geeignet für den Einsatz in
der Roboter-assistierten Chirurgie.
Eine weitere Informationsquelle für den Operateur kann speziell in der Larynxchirurgie
die Endosonografie dienen [84]. Hierfür wird ein spezieller Ultraschallkopf in den mit Wasser gefüllten Larynx
eingeführt, um zusätzliche anatomische Details zu erkennen.
Die Roboter-assistierte Chirurgie bietet besonders aufgrund der elektronisch transportierten
Bildgebung neue Möglichkeiten zum Einsatz von Software, welche den Operateur in seiner
Arbeit unterstützt. Allgemein bekannt sind die Vorteile des ,narrow band imaging‘
für die frühzeitige Erkennung von Präkanzerosen oder die bessere Abgrenzung von malignen
Strukturen [83]. Darüber hinaus bestehen aber zusätzliche Technologien, wie die Hochfrequenz-Bildgebung
und optische Kohärenztomografie [176]. In dem oben genannten MicroRALP-Projekt sind multiple Software-Lösungen zum Einsatz
gekommen. Diese ermöglichen z. B. die automatische Verfolgung von beweglichen Gewebestrukturen
(soft tissue tracking) [157], Methoden zur Oberflächenrekonstruktion [156] oder die automatische Instrumentenerkennung durch das Roboter-System [5]. All diesen Methoden könnte die Roboter-assistierte Chirurgie den Weg in die routinemäßige
Anwendung eröffnen.
Abschließend werden auch geografische Distanzen überwunden und Roboter-assistierte
Operationen können über große Entfernungen hinweg durchgeführt werden. So konnte im
Tiermodell schon eine Gallenblasen-Resektion durchgeführt werden, bei welcher sich
der Operateur in New York und der Patient im 7000 Kilometer entfernten Straßburg befand
[111].
15. Schlussfolgerung
Mit steigenden Fallzahlen und der Erweiterung der Indikationen wird das Potenzial
der RAC-Technologie im Kopf-Hals-Bereich deutlich. Mit Sicherheit werden einige Patientengruppen
in Zukunft davon profitieren können. Einige fokussierte Zentren verwenden Roboter-Systeme
schon heute regelmäßig für Eingriffe im Oropharynx-Bereich oder an der Schilddrüse.
Rein experimentell verbleibt aktuell die Anwendung der RAC an der Schädelbasis und
den Nasennebenhöhlen. Trotz aller Fortschritte ist der sichere Nachweis eines Vorteils
der RAC gegenüber den konventionellen Operationsmethoden wie transorale Lasermikrochirurgie
bisher nicht erbracht worden. Zusätzlich stellen sicherlich der finanzielle Mehraufwand
und die weiterhin aufwändige Handhabung der Roboter-Systeme die größten Hürden für
einen flächendeckenden Einsatz der RAC in der klinischen Routine dar. Weitere randomisierte
klinische Studien können helfen, um die Vor- und Nachteile dieser spannenden Technologie
weiter zu beleuchten.
Wünschenswert sind außerdem spezielle Instrumente und auch alternative RAC-Systeme
für die wachsende Anzahl an möglichen RAC-Indikationen. Ebenso ist eine Kombination
mit anderen technischen Weiterentwicklungen, wie z. B. hyperspektrale Bildgebung,
visuelle Haptik oder automatisierte Resektionsmechanismen, möglich.
Zusammenfassend kann die RAC die bisherigen konventionellen Operationsmethoden in
Zukunft sinnvoll ergänzen ohne diese vollständig abzulösen. Technische, wissenschaftliche
und ethische Konflikte werden daher die Arbeit der aktuellen Generation von Kopf-Hals-Chirurgen
im zunehmenden Maße beeinflussen.





